harmony 鸿蒙标准系统方案之扬帆移植案例
标准系统方案之扬帆移植案例
本文章是基于瑞芯微RK3399芯片的yangfan开发板,进行标准系统相关功能的移植,主要包括产品配置添加,内核启动、升级,音频ADM化,Camera,TP,LCD,WIFI,BT,vibrator、sensor、图形显示模块的适配案例总结,以及相关功能的适配。 开发板系统移植采用Board仓和SoC代码分离方案,Board仓保存板载驱动的模块,例如音频,Camera,TP,WIFI等驱动模块的适配代码。在SoC仓保存与SoC驱动相关模块,例如I2C,ISP,RGA等驱动模块的适配代码。
产品配置和目录规划
产品配置
在产品//vendor/yangfan目录下创建config.json文件,并指定CPU的架构。//vendor/yangfan/rk3399.json配置如下:
{
"product_name": "yangfan",---产品名:yangfan
"device_company": "rockchip",---单板厂商:rockchip
"device_build_path": "device/board/isoftstone/yangfan",---设备构建路径:device/board/isoftstone/yangfan
"target_cpu": "arm",---目标cpu:arm
"type": "standard",---配置系统的级别:standard
"version": "3.0",---版本:3.0
"board": "yangfan",---单板名:yangfan
"enable_ramdisk": true,---启用内存虚拟盘:true
"build_selinux": true,---构建selinux:true
"inherit": [ "productdefine/common/inherit/rich.json", "productdefine/common/inherit/chipset_common.json" ],
"subsystems": [
{
"subsystem": "security",
"components": [
{
"component": "selinux",
"features": []
}
]
},
{
"subsystem": "communication",
"components": [
{
"component": "netmanager_ext",
"features": []
}
]
},
...
}
主要的配置内容包括:
- “product_name”: “yangfan”,—产品名:yangfan
- “device_company”: “rockchip”,—单板厂商:rockchip
- “device_build_path”: “device/board/isoftstone/yangfan”,—设备构建路径:device/board/isoftstone/yangfan
- “target_cpu”: “arm”,—目标cpu:arm
- “type”: “standard”,—配置系统的级别:standard
- “version”: “3.0”,—版本:3.0
- “board”: “yangfan”,—单板名:yangfan
- “enable_ramdisk”: true,—启用内存虚拟盘:true
已定义的子系统可以在//build/subsystem_config.json中找到。当然也可以定制子系统。
建议先拷贝Hi3516DV300开发板的配置文件,删除掉hisilicon_products子系统。该子系统为Hi3516DV300 SOC编译内核,不适合RK3568。
目录规划
参考Board和SoC解耦的设计思路,并把芯片适配目录规划为:
device
├── board --- 单板厂商目录
│ └── isoftstone --- 单板厂商名字:
│ └── yangfan --- 单板名:扬帆,主要放置开发板相关的驱动业务代码
└── soc --- SoC厂商目录
└── rockchip --- SoC厂商名字:rockchip
└── rk3399 --- SoC Series名:rk3399,主要为芯片原厂提供的一些方案,以及闭源库等
产品样例目录规划为:
vendor
└── isoftstone
└── yangfan --- 产品名字:产品、hcs以及demo相关
内核启动
二级启动
二级启动简单来说就是将之前直接挂载system,从system下的init启动,改成先挂载ramdsik,从ramdsik中的init 启动,做些必要的初始化动作,如挂载system,vendor等分区,然后切到system下的init 。
RK3399适配主要是将主线编译出来的ramdisk 打包到boot_linux.img中,主要有以下工作:
- 使能二级启动
在//vendor/yangfan/rk3399.json中使能enable_ramdisk。
{
"product_name": "yangfan",
"device_company": "rockchip",
"device_build_path": "device/board/isoftstone/yangfan",
"target_cpu": "arm",
"type": "standard",
"version": "3.0",
"board": "yangfan",
"enable_ramdisk": true,
"build_selinux": true,
...
}
- 将主线编译出来的ramdsik.img 打包到boot_linux.img
配置:
由于rk 启动uboot 支持从ramdisk 启动,只需要在打包boot_linux.img 的配置文件中增加ramdisk.img ,因此没有使用主线的its格式,具体配置就是在内核编译脚本make-ohos.sh 中增加:
function make_extlinux_conf()
{
dtb_path=$1
uart=$2
image=$3
echo "label rockchip-kernel-5.10" > ${EXTLINUX_CONF}
echo " kernel /extlinux/${image}" >> ${EXTLINUX_CONF}
echo " fdt /extlinux/${TOYBRICK_DTB}" >> ${EXTLINUX_CONF}
if [ "enable_ramdisk" == "${ramdisk_flag}" ]; then
echo " initrd /extlinux/ramdisk.img" >> ${EXTLINUX_CONF}
fi
cmdline="append earlycon=uart8250,mmio32,${uart} root=PARTUUID=614e0000-0000-4b53-8000-1d28000054a9 rw rootwait rootfstype=ext4"
echo " ${cmdline}" >> ${EXTLINUX_CONF}
}
打包
增加了打包boot镜像的脚本make-boot.sh,供编译完ramdisk,打包boot 镜像时调用,主要内容:
genext2fs -B ${blocks} -b ${block_size} -d boot_linux -i 8192 -U boot_linux.img
调用make-boot.sh的修改请参考RK3568 适配二级启动。
INIT配置
init相关配置请参考启动恢复子系统即可
音频
简介
本文以OpenHarmony 3.0为基础,讲解基于HDF(Hardware Driver Foundation)驱动框架开发的Audio驱动框架,包括Audio驱动的架构组成、功能部件的实现和服务节点详细介绍。
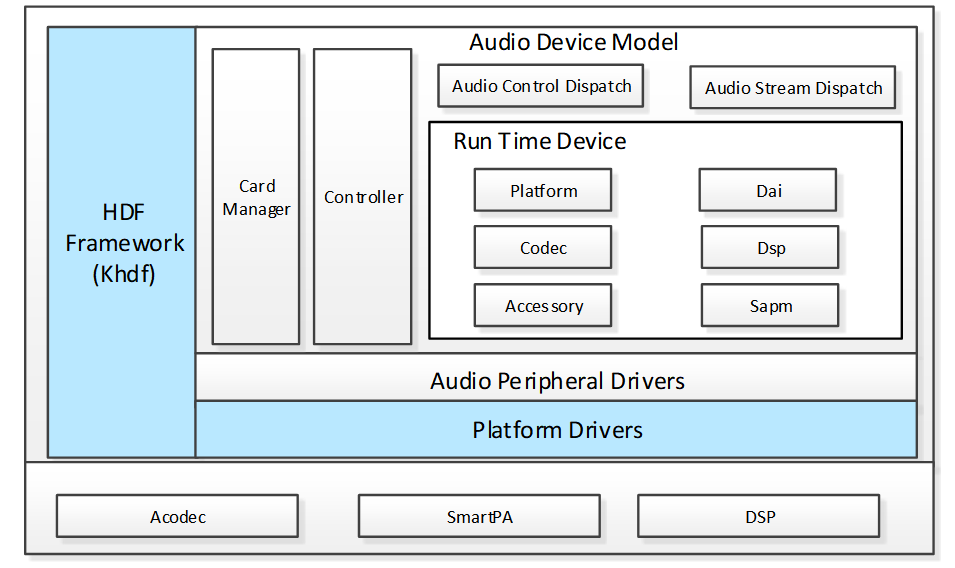
- ADM(Audio Driver Model)
音频驱动框架模型,向上服务于多媒体音频子系统,便于系统开发者能够更便捷的根据场景来开发应用。向下服务于具体的设备厂商,对于Codec和DSP设备厂商来说,可根据ADM模块提供的向下统一接口适配各自的驱动代码,就可以实现快速开发和适配HOS系统。
- Audio Control Dispatch
接收lib层的控制指令并将控制指令分发到驱动层。
- Audio Stream Dispatch
向上通过lib层完成数据流的接收,向下完成数据流对驱动层的分发。
- Card Manager
多声卡管理模块。每个声卡含有Dai、Platform、Codec、Accessory、Dsp、Sapm模块。
- Platform Driver
驱动适配层。
- SAPM(Smart Audio Power Manager)
电源管理模块,对整个ADM电源进行功耗策略优化。
Audio驱动介绍
代码目录
drivers
├── framework
│ └── model
│ │ └── audio #框架代码
│ │ ├─── common #公共实现
│ │ ├─── core #核心
│ │ ├─── dispatch #控制流和数据流实现
│ │ └── sapm #电源管理
│ └── include
│ └── audio #对外接口
├── adapter
│ └──khdf
│ └── linux
│ └── model
│ └── audio #编译文件
└── peripheral
└── audio
└── chipsets
└── rk3399 #驱动实现
├── accessory #SmartPA驱动
├── dai #I2S驱动
└── soc #Dma驱动
Audio流程说明
启动流程
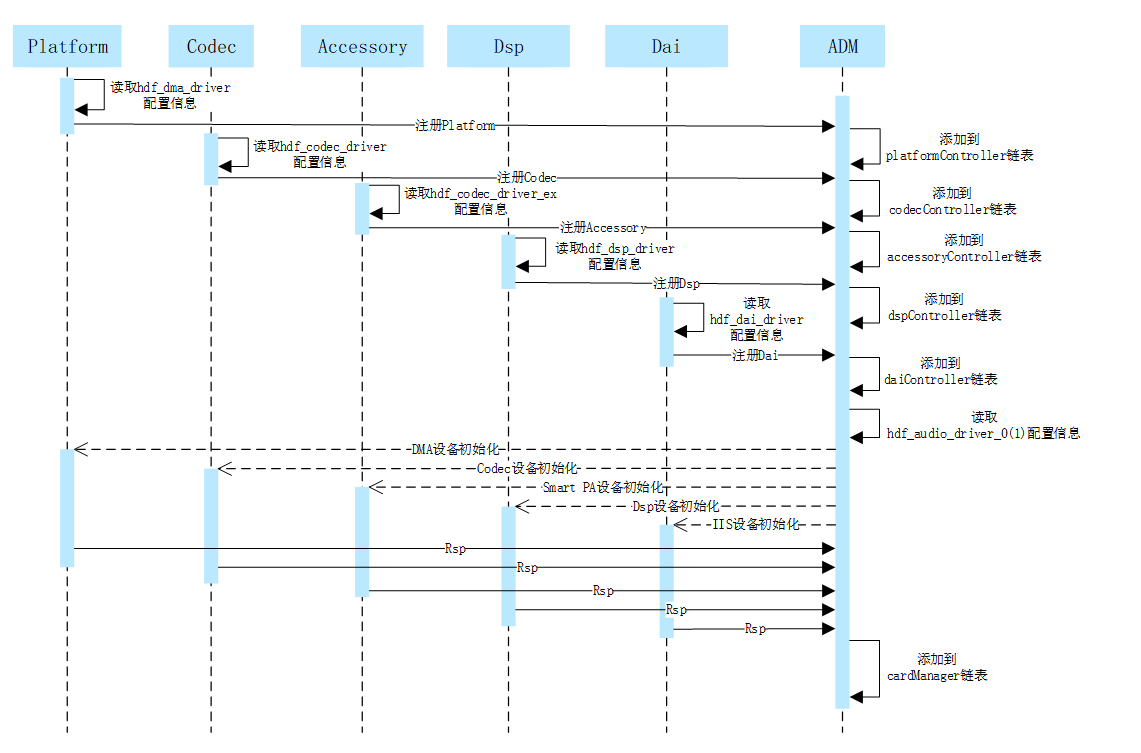
- 系统启动时audio模块的Platform、Codec、Accessory、Dsp、Dai各个驱动首先被加载,各驱动从各自私有配置文件中获取配置信息,并将获取的配置信息保存到各驱动的Data数据结构中。
- 各驱动模块调用ADM注册接口将自己添加到各驱动模块的链表中。
- ADM模块读取hdf_audio_driver_0(音频card_0)和hdf_audio_driver_1(音频card_1)配置信息,加载各模块的具体设备。
- ADM模块调用各模块的初始化函数对各模块设备进行初始化。
- 将初始化成功的音频设备添加到cardManager链表。
播放流程
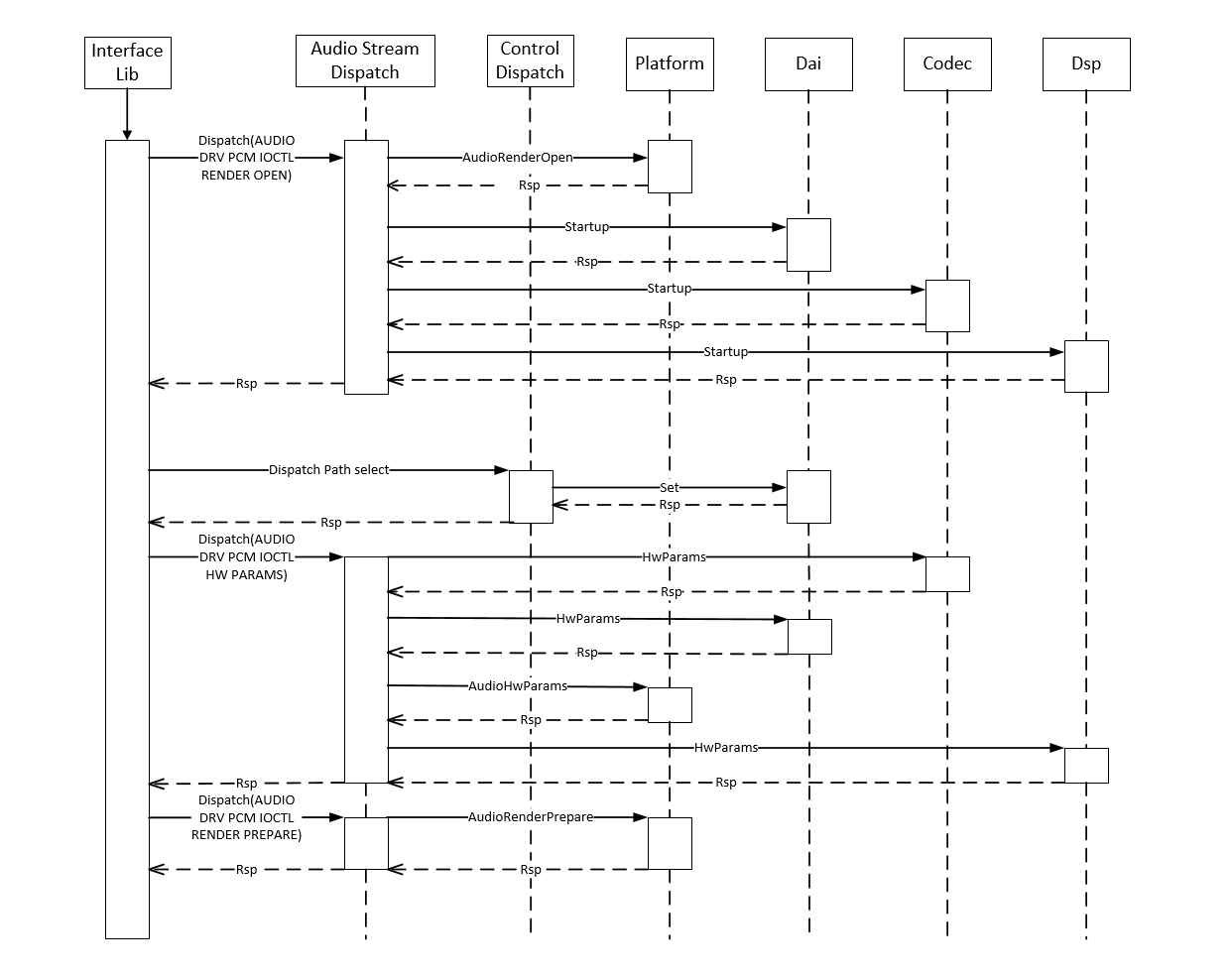
- 播放音频,首先Interface Lib层通过播放流服务下发Render Open指令,Render Stream Dispatch服务收到指令后分别调用各模块的函数接口对指令进行下发。
- Interface Lib层通过控制服务下发通路选择指令,Control Dispatch控制服务收到指令后调用Dai模块接口设置通路。
- Interface Lib层通过播放流服务下发硬件参数,Render Stream Dispatch服务收到参数后分别调用各模块参数设置接口,对硬件参数进行设置。
- Interface Lib层通过播放流服务下发播放启动指令,Render Stream Dispatch服务收到指令后分别调用各模块启动接口,对各模块进行启动设置。
- Interface Lib层通过播放流服务下发音频数据,Render Stream Dispatch服务收到数据后调用Platform AudioPcmWrite接口将音频数据传给Dma。
- Interface Lib层通过播放流服务下发播放停止指令,Render Stream Dispatch服务收到指令后分别调用各模块停止接口,对各模块进行停止设置。
- Interface Lib层通过播放流服务下发Render Close指令,Render Stream Dispatch服务收到指令后调用Platform AudioRenderClose接口对已申请资源进行释放。
控制流程
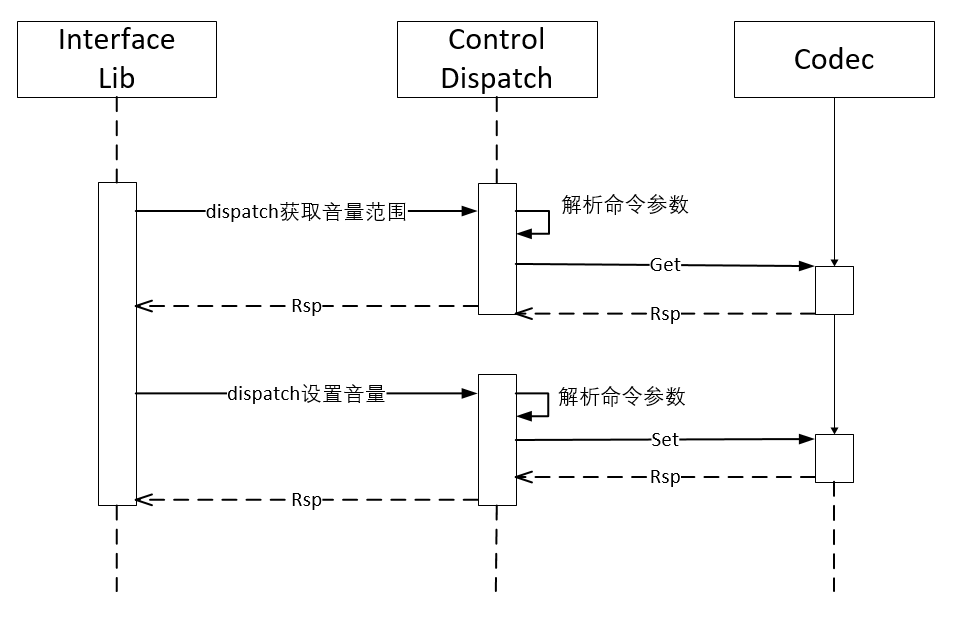
- 设置音量,首先Interface Lib层通过控制服务下发获取音量范围指令,Control Dispatch控制服务收到指令后进行解析并调用Codec模块Get函数接口获取可设置音量范围。
- Interface Lib层通过控制服务下发设置音量指令,Control Dispatch控制服务收到指令后进行解析并调用Codec模块Set函数接口设置音量。
实现说明
- 驱动注册
以codec的注册函数为例,当codec驱动初始化时调用如下codec注册函数,将codec注册到codecController链表中。
int32_t AudioRegisterCodec(struct HdfDeviceObject *device, struct CodecData *codecData, struct DaiData *daiData)
{
...
codec = (struct CodecDevice *)OsalMemCalloc(sizeof(*codec));
...
OsalMutexInit(&codec->mutex);
codec->devCodecName = codecData->drvCodecName;
codec->devData = codecData;
codec->device = device;
ret = AudioSocRegisterDai(device, daiData);
...
DListInsertHead(&codec->list, &codecController);
...
}
- 数据流数据分发
当录音或者播放时,上层lib层通过dispatch将数据下发或读取数据,此接口接收到lib层的请求后,将数据进行分发或将数据返回。
static int32_t StreamDispatch(struct HdfDeviceIoClient *client, int cmdId,
struct HdfSBuf *data, struct HdfSBuf *reply)
{
unsigned int count = sizeof(g_streamDispCmdHandle) / sizeof(g_streamDispCmdHandle[0]);
for (unsigned int i = 0; i < count; ++i) {
if ((cmdId == (int)(g_streamDispCmdHandle[i].cmd)) && (g_streamDispCmdHandle[i].func != NULL)) {
return g_streamDispCmdHandle[i].func(client, data, reply);
}
}
ADM_LOG_ERR("invalid [cmdId=%d]", cmdId);
return HDF_FAILURE;
}
- 控制功能注册接口
音量控制、增益控制、通路控制等控制功能都是通过此接口添加到声卡控制列表。
int32_t AudioAddControls(struct AudioCard *audioCard, const struct AudioKcontrol *controls, int32_t controlMaxNum)
{
...
for (i = 0; i < controlMaxNum; i++) {
control = AudioAddControl(audioCard, &controls[i]);
if (control == NULL) {
ADM_LOG_ERR("Add control fail!");
return HDF_FAILURE;
}
DListInsertHead(&control->list, &audioCard->controls);
}
ADM_LOG_DEBUG("Success.");
return HDF_SUCCESS;
}
- 电源管理接口
添加组件实现:
int32_t AudioSapmNewComponents(struct AudioCard *audioCard,
const struct AudioSapmComponent *component, int32_t cptMaxNum)
{
...
for (i = 0; i < cptMaxNum; i++) {
ret = AudioSapmNewComponent(audioCard, component);
if (ret != HDF_SUCCESS) {
ADM_LOG_ERR("AudioSapmNewComponent fail!");
return HDF_FAILURE;
}
component++;
}
return HDF_SUCCESS;
}
添加通路实现:
int32_t AudioSapmAddRoutes(struct AudioCard *audioCard, const struct AudioSapmRoute *route, int32_t routeMaxNum)
{
...
for (i = 0; i < routeMaxNum; i++) {
ret = AudioSapmAddRoute(audioCard, route);
if (ret != HDF_SUCCESS) {
ADM_LOG_ERR("AudioSapmAddRoute failed!");
return HDF_FAILURE;
}
route++;
}
return HDF_SUCCESS;
}
添加控制功能实现:
int32_t AudioSapmNewControls(struct AudioCard *audioCard)
{
...
DLIST_FOR_EACH_ENTRY(sapmComponent, &audioCard->components, struct AudioSapmComponent, list) {
if (sapmComponent->newCpt) {
continue;
}
if (sapmComponent->kcontrolsNum > 0) {
sapmComponent->kcontrols = OsalMemCalloc(sizeof(struct AudioKcontrol*) * sapmComponent->kcontrolsNum);
if (sapmComponent->kcontrols == NULL) {
ADM_LOG_ERR("malloc kcontrols fail!");
return HDF_FAILURE;
}
}
switch (sapmComponent->sapmType) {
case AUDIO_SAPM_ANALOG_SWITCH:
case AUDIO_SAPM_MIXER:
case AUDIO_SAPM_MIXER_NAMED_CTRL:
case AUDIO_SAPM_SPK:
case AUDIO_SAPM_PGA:
ret = AudioSapmNewMixerControls(sapmComponent, audioCard);
break;
case AUDIO_SAPM_MUX:
case AUDIO_SAPM_VIRT_MUX:
case AUDIO_SAPM_VALUE_MUX:
ret = AudioSapmNewMuxControls(sapmComponent, audioCard);
break;
default:
ret = HDF_SUCCESS;
break;
}
...
ReadInitComponentPowerStatus(sapmComponent);
sapmComponent->newCpt = 1;
DListInsertTail(&sapmComponent->dirty, &audioCard->sapmDirty);
}
ret = AudioSapmPowerComponents(audioCard);
...
return HDF_SUCCESS;
}
- 控制流数据分发
当录音或者播放时,上层lib层通过dispatch将控制指令下发,此接口接收到lib层的控制指令后,将控制指令分发到各驱动模块。
static int32_t ControlDispatch(struct HdfDeviceIoClient *client, int cmdId,
struct HdfSBuf *data, struct HdfSBuf *reply)
{
...
if (cmdId >= AUDIODRV_CTRL_IOCTRL_ELEM_BUTT||cmdId < 0) {
ADM_LOG_ERR("Invalid [cmdId=%d].", cmdId);
return HDF_FAILURE;
}
for (i = 0; i < HDF_ARRAY_SIZE(g_controlDispCmdHandle); ++i) {
if ((cmdId == (int)(g_controlDispCmdHandle[i].cmd)) && (g_controlDispCmdHandle[i].func != NULL)) {
return g_controlDispCmdHandle[i].func(client, data, reply);
}
}
return HDF_FAILURE;
}
Audio服务介绍
服务节点
基于ADM框架的audio驱动对HDI层提供三个服务hdf_audio_render、hdf_audio_capture、hdf_audio_control。 开发板audio驱动服务节点如下:
console:/dev # ls -al hdf_audio_*
crw------- 1 system system 249, 5 1970-01-01 00:21 hdf_audio_capture //录音数据流服务。
crw------- 1 system system 249, 3 1970-01-01 00:21 hdf_audio_codec_dev0 //音频设备名称。
crw------- 1 system system 249, 4 1970-01-01 00:21 hdf_audio_control //音频控制流服务。
crw------- 1 system system 249, 6 1970-01-01 00:21 hdf_audio_render //播放数据流务。
- 音频控制流服务
用来接收上层lib层下发的控制指令,包括音量控制、增益控制、通路控制,这些控制指令都是通过控制流服务下发到驱动。
- 音频数据播放流服务
用来接收上层lib层下发的音频数据和播放相关的参数,还有播放的启动、暂停、恢复、停止指令,这些指令都是由播放数据流下发到驱动。
- 音频数据录音流服务
用来向上层lib层传输音频数据和接收上层lib层下发的录音相关的参数,还有录音的启动、暂停、恢复、停止指令,这些指令都是由录音数据流下发到驱动。
驱动服务
每个audio设备包括如下服务:
| hdf_audio_codec_dev0 | 音频设备名称 |
|---|---|
| dma_service_0 | dma 驱动服务 |
| dai_service | cpu dai 驱动服务 |
| codec_service_0 | codec 驱动服务 |
| dsp_service_0 | dsp 驱动服务(可选项) |
| hdf_audio_codec_dev1 | 音频设备名称 |
|---|---|
| dma_service_0 | dma 驱动服务 |
| dai_service | cpu dai 驱动服务 |
| codec_service_1 | accessory 驱动服务(特指smartPA) |
| dsp_service_0 | dsp 驱动服务(可选项) |
代码路径
vendor/rockchip/rk3399/hdf_config/khdf
├── audio #audio私有配置文件
├── device_info
| └── device_info.hcs #设备配置文件
└── hdf.hcs #引用hcs配置文件
配置节点说明
以codec驱动为例,在device_info.hcs文件中的audio host节点下添加codec节点信息。
audio :: host {
hostName = "audio_host";
priority = 60;
...
device_codec :: device {
device0 :: deviceNode {
policy = 1;
priority = 50;
preload = 0;
permission = 0666;
moduleName = "CODEC_ES8316";
serviceName = "codec_service_0";
deviceMatchAttr = "hdf_codec_driver";
}
}
...
}
实现驱动
在驱动文件中实现与device_info.hcs配置节点moduleName相同的驱动逻辑。
/* HdfDriverEntry implementations */
static int32_t Es8316DriverBind(struct HdfDeviceObject *device)
{
...
return HDF_SUCCESS;
}
static int32_t Es8316DriverInit(struct HdfDeviceObject *device)
{
...
return HDF_SUCCESS;
}
/* HdfDriverEntry definitions */
struct HdfDriverEntry g_es8316DriverEntry = {
.moduleVersion = 1,
.moduleName = "CODEC_ES8316",
.Bind = Es8316DriverBind,
.Init = Es8316DriverInit,
.Release = NULL,
};
HDF_INIT(g_es8316DriverEntry);
总结
基于HDF框架的ADM音频框架,为Open Harmony的音频开发提供了统一的架构基础,为各平台音频驱动适配提供了统一的接口。音频驱动可以一平台开发多平台适用,提高了开发效率。此文档对ADM框架进行了简单的介绍,希望有助于开发者开发和应用。
Camera
简介
本文以OpenHarmony 3.0为基础,讲解基于HDF(Hardware Driver Foundation)驱动框架开发的Camera驱动框架,包括Camera驱动的架构组成、功能部件的实现和服务节点详细介绍。
Camera驱动框架图
OpenHarmony HDF Camera驱动模块架构图
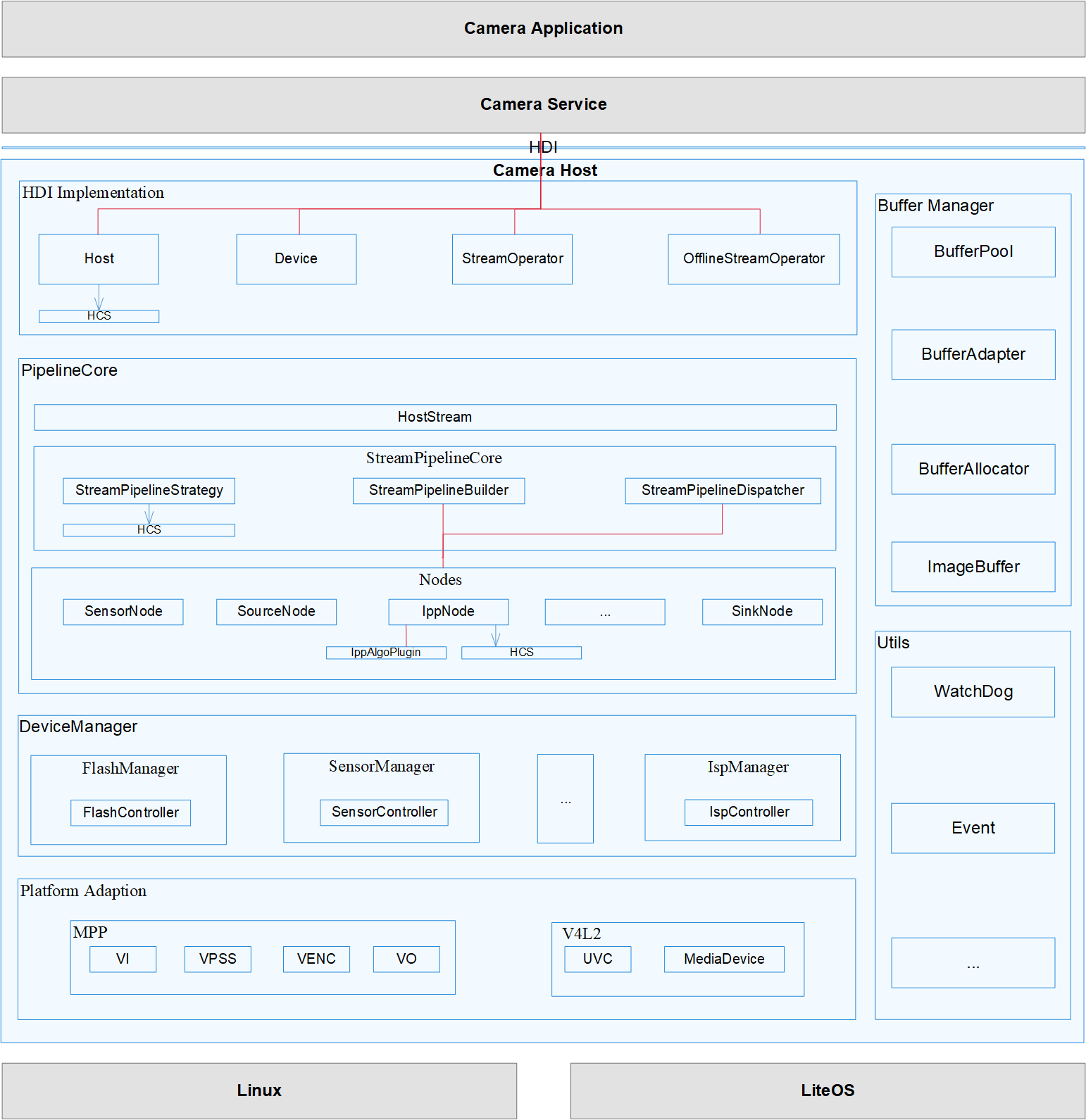
以Camera Host 部分做如下说明:
- HDI实现层(HDI Implementation):对上实现Open Harmony OS相机标准南向接口。
- 框架层(PipelineCore):对接HDI实现层的控制、流的转发,实现数据通路的搭建、管理相机各个硬件设备等功能。
- 适配层(Platform Adaption):屏蔽底层芯片和OS差异,支持多平台适配。
对于rk3399E/T的Usb Camera来分析,内核使用linux-4.19。Usb Camera依赖linux下的V4L2的uvc,从上面的框架图分析HDF Camera已经实现了兼容linux 的 V4L2 uvc,所以调试过程首先要保证uvc所涉及的USB和Camera的驱动正常。
Camera驱动介绍
配置信息
arch/arm64/configs/rockchip_linux_defconfig
CONFIG_VIDEO_V4L2_SUBDEV_API=y
CONFIG_MEDIA_USB_SUPPORT=y
CONFIG_USB_VIDEO_CLASS=y
节点信息
插入Usb Camera 前
# ls -l dev/video*
crw-rw---- 1 root root 81, 0 2013-01-18 10:59 dev/video0
crw-rw---- 1 root root 81, 1 2013-01-18 10:59 dev/video1
crw-rw---- 1 root root 81, 2 2013-01-18 10:59 dev/video2
crw-rw---- 1 root root 81, 3 2013-01-18 10:59 dev/video3
crw-rw---- 1 root root 81, 4 2013-01-18 10:59 dev/video4
crw-rw---- 1 root root 81, 5 2013-01-18 10:59 dev/video5
crw-rw---- 1 root root 81, 6 2013-01-18 10:59 dev/video6
crw-rw---- 1 root root 81, 7 2013-01-18 10:59 dev/video7
crw-rw---- 1 root root 81, 8 2013-01-18 10:59 dev/video8
crw-rw---- 1 root root 81, 9 2013-01-18 10:59 dev/video9
#
插入Usb Camera后新增节点dev/video10和dev/video11
# ls -l dev/video*
crw-rw---- 1 root root 81, 0 2013-01-18 10:59 dev/video0
crw-rw---- 1 root root 81, 1 2013-01-18 10:59 dev/video1
crw------- 1 root root 81, 10 2013-01-18 11:01 dev/video10
crw------- 1 root root 81, 11 2013-01-18 11:01 dev/video11
crw-rw---- 1 root root 81, 2 2013-01-18 10:59 dev/video2
crw-rw---- 1 root root 81, 3 2013-01-18 10:59 dev/video3
crw-rw---- 1 root root 81, 4 2013-01-18 10:59 dev/video4
crw-rw---- 1 root root 81, 5 2013-01-18 10:59 dev/video5
crw-rw---- 1 root root 81, 6 2013-01-18 10:59 dev/video6
crw-rw---- 1 root root 81, 7 2013-01-18 10:59 dev/video7
crw-rw---- 1 root root 81, 8 2013-01-18 10:59 dev/video8
crw-rw---- 1 root root 81, 9 2013-01-18 10:59 dev/video9
#
打开设备节点
在Open Harmony OS的代码环境中,编译如下代码为可执行程序,在开发板测执行,无报错说明该节点open success。
#include <stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <stdlib.h>
#include <unistd.h>
#include <sys/ioctl.h>
#include <linux/videodev2.h>
#include <string.h>
#include <sys/mman.h>
int main(void)
{
// 1. 打开设备
int fd = open("/dev/video10", O_RDWR);
if (fd < 0) {
printf("open device fail\n");
return -1;
}
close(fd);
return 0;
}
获取参数
#include <stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <stdlib.h>
#include <unistd.h>
#include <sys/ioctl.h>
#include <linux/videodev2.h>
#include <string.h>
#include <sys/mman.h>
int main(void)
{
// 1. 打开设备
int fd = open("/dev/video10", O_RDWR);
if (fd < 0) {
printf("open device fail\n");
return -1;
}
// 2. 获取摄像头支持的格式 ioctl(文件描述符, 命令, 与命令对应的结构体)
struct v4l2_fmtdesc v4fmt;
v4fmt.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
int i = 0;
while(1) {
v4fmt.index = i++;
int ret = ioctl(fd, VIDIOC_ENUM_FMT, &v4fmt);
if (ret < 0) {
printf("get fmt fail\n");
}
unsigned char *p = (unsigned char*)&v4fmt.pixelformat;
printf("index=%d\n", v4fmt.index);
printf("flags=%d\n", v4fmt.flags);
printf("description=%s\n", v4fmt.description);
printf("pixelformat=%c%c%c%c\n", p[0], p[1], p[2], p[3]);
printf("reserved=%d\n", v4fmt.reserved[0]);
}
close(fd);
return 0;
}
在Open Harmony OS的代码环境中,编译如上代码为可执行程序,在开发板测执行。结果显示支持YUYV和MJPEG 2种输出格式。
index=0
flags=0
description=YUYV 4:2:2
pixelformat=YUYV
reserved=0
index=1
flags=1
description=Motion-JPEG
pixelformat=MJPG
reserved=0
设置缓冲区队列
#include <stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <stdlib.h>
#include <unistd.h>
#include <sys/ioctl.h>
#include <linux/videodev2.h>
#include <string.h>
#include <sys/mman.h>
int main(void)
{
// 1. 打开设备
int fd = open("/dev/video10", O_RDWR);
if (fd < 0) {
printf("open device fail\n");
return -1;
}
// 2. 设置采集格式
struct v4l2_format vfmt;
vfmt.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
vfmt.fmt.pix.width = 640;
vfmt.fmt.pix.height = 480;
vfmt.fmt.pix.pixelformat = V4L2_PIX_FMT_YUYV; // 设置的视频采集格式(与上面获取的格式一致)
int ret = ioctl(fd, VIDIOC_S_FMT, &vfmt); // 设置格式
if (ret < 0) {
printf("set fmt fail\n");
return -1;
}
memset(&vfmt, 0, sizeof(vfmt));
vfmt.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
ret = ioctl(fd, VIDIOC_G_FMT, &vfmt); // 获取格式
if (ret < 0) {
printf("set->get fmt fail\n");
return -1;
}
// 3. 申请内核缓冲区队列
struct v4l2_requestbuffers reqbuffer;
reqbuffer.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
reqbuffer.count = 4; // 申请4个缓冲区
reqbuffer.memory = V4L2_MEMORY_MMAP; // 内存映射方式 MMAP/USERPTR
ret = ioctl(fd, VIDIOC_REQBUFS, &reqbuffer); // 分配内存
if (ret < 0) {
printf("req buffer fail\n");
return -1;
}
// 4. 关闭设备
close(fd);
return 0;
}
在Open Harmony OS的代码环境中,编译如上代码为可执行程序,在开发板测执行。
执行结果:req buffer fail
原因分析:ioctl(fd, VIDIOC_REQBUFS, &reqbuffer); 失败
定位方法1:在内核中加LOG定位VIDIOC_REQBUFS失败的地方。发现所有的ioctl命令下发后都会使用drivers/media/v4l2-core/v4l2-ioctl.c中的video_usercopy接口,但还是没有定位到具体的失败原因。
定位方法2:求助视美泰验证linux-4.19内核debian版本的Usb Camera是否OK。结果:debian版本使用gst-launch-1.0 v4l2src device=/dev/video10 ! image/jpeg, width= 1280, height=720, framerate=30⁄1 ! jpegparse ! mppjpegdec ! kmssink sync=false命令后HDMI屏幕可以出来正常的预览画面。
通过如上的操作后,基本可以确认linux的V4L2 uvc驱动和外设Usb Camera驱动都是正常的。接下来就该调试Open Harmony OS的HDF Camera了。
接口介绍
查看现有Open Harmony OS上的关于camera的可执行程序:ohos_camera_demo、v4l2_main
ohos_camera_demo
执行结果:输入o后无预览画面,也无LOG报错信息。
# ohos_camera_demo
GetUintParameter debug.bytrace.tags.enableflags error.
Options:
-h|--help Print this message
-o|--offline stream offline test
-c|--capture capture one picture
-w|--set WB Set white balance Cloudy
-v|--video capture Viedeo of 10s
-a|--Set AE Set Auto exposure
-f|--Set Flashlight Set flashlight ON 5s OFF
-q|--quit stop preview and quit this app
o
Options:
-h|--help Print this message
-o|--offline stream offline test
-c|--capture capture one picture
-w|--set WB Set white balance Cloudy
-v|--video capture Viedeo of 10s
-a|--Set AE Set Auto exposure
-f|--Set Flashlight Set flashlight ON 5s OFF
-q|--quit stop preview and quit this app
原因分析:ohos_camera_demo目前仅支持MPP,不支持V4L2,故先放弃该demo调试。
v4l2_main
执行结果:输入u 报错:ERROR:main test:cannot open framebuffer /dev/fb0 file node
Options:
-h|--help Print this message
-p|--preview start preview on platform sensor
-c|--capture capture one picture
-w|--set WB Set white balance Cloudy
-e|--Set AE Set exposure time
-v|--video capture Viedeo of 10s
-u|--uvc start preview on uvc preview
-a|--Set ATE Set Auto exposure
-q|--quit stop preview and quit this app
INFO:please input command(input -q exit this app)
u
ERROR:main test:cannot open framebuffer /dev/fb0 file node
INFO:V4L2OpenDevice /dev/video10
原因分析:查看dev/fb0节点是否存在:不存在fb0节点。继续查找根目录下有无其他fb0节点,出现了dev/graphics/fb0节点。
# ls -l dev/fb0
ls: dev/fb0: No such file or directory
# find -name fb0
./dev/graphics/fb0
./sys/class/graphics/fb0
./sys/devices/platform/display-subsystem/graphics/fb0
需把v4l2_main可执行程序中的dev/fb0改为dev/graphics/fb0。此处fb0为framebuffer,作用是在屏幕上显示预览画面。
修改点:drivers/peripheral
diff --git a/camera/hal/adapter/platform/v4l2/src/driver_adapter/main_test/v4l2_main.cpp b/camera/hal/adapter/platform/v4l2/src/driver_adapter/main_test/v4l2_main.cpp
index b351f49..d9c4cb3 100755
--- a/camera/hal/adapter/platform/v4l2/src/driver_adapter/main_test/v4l2_main.cpp
+++ b/camera/hal/adapter/platform/v4l2/src/driver_adapter/main_test/v4l2_main.cpp
@@ -186,9 +186,9 @@ RetCode FBInit()
if (g_fbFd)
return RC_OK;
- g_fbFd = open("/dev/fb0", O_RDWR);
+ g_fbFd = open("/dev/graphics/fb0", O_RDWR);
if (g_fbFd < 0) {
- CAMERA_LOGE("main test:cannot open framebuffer %s file node\n", "/dev/fb0");
+ CAMERA_LOGE("main test:cannot open framebuffer %s file node\n", "/dev/graphics/fb0");
return RC_ERROR;
}
diff --git a/camera/hal/test/v4l2/src/test_display.cpp b/camera/hal/test/v4l2/src/test_display.cpp
index db908e7..7025deb 100644
--- a/camera/hal/test/v4l2/src/test_display.cpp
+++ b/camera/hal/test/v4l2/src/test_display.cpp
@@ -114,9 +114,9 @@ void TestDisplay::FBLog()
RetCode TestDisplay::FBInit()
{
- fbFd_ = open("/dev/fb0", O_RDWR);
+ fbFd_ = open("/dev/graphics/fb0", O_RDWR);
if (fbFd_ < 0) {
- CAMERA_LOGE("main test:cannot open framebuffer %s file node\n", "/dev/fb0");
+ CAMERA_LOGE("main test:cannot open framebuffer %s file node\n", "/dev/graphics/fb0");
return RC_ERROR;
}
@@ -439,4 +439,4 @@ void TestDisplay::StopStream(std::vector<int>& captureIds, std::vector<int>& str
std::cout << "==========[test log]check Capture: ReleaseStreams fail, rc = " << rc << std::endl;
}
}
-}
\ No newline at end of file
+}
diff --git a/display/hal/default/display_layer.c b/display/hal/default/display_layer.c
index ee7a825..e12a653 100644
--- a/display/hal/default/display_layer.c
+++ b/display/hal/default/display_layer.c
@@ -24,7 +24,7 @@
#define DEV_ID 0
#define LAYER_ID 0
-#define FB_PATH "/dev/fb0"
+#define FB_PATH "/dev/graphics/fb0"
#define DISP_WIDTH 800
#define DISP_HEIGHT 480
#define BITS_PER_PIXEL 32
修改后重新编译v4l2_main,编译命令:./build.sh –product-name rk3399 –ccache –build-target v4l2_main
编译成功后可执行程序路径:./out/rk3399/hdf/hdf/v4l2_main
将新编译的v4l2_main推送到开发板测的system/bin路径下:
hdc shell "mount -o rw,remount /"
hdc file send D:\cyyanl\work\RockChip\bin\v4l2_main /system/bin
继续执行v4l2_main结果后无framebuffer报错,说明该问题已解决。(另一种思路:分析fb0为何在/dev/graphics/fb0而不是常规的/dev/fb0,然后修改为/dev/fb0。后面有时间再调试该思路)
新报错:ERROR:error: ioctl VIDIOC_QUERYBUF failed.
Options:
-h|--help Print this message
-p|--preview start preview on platform sensor
-c|--capture capture one picture
-w|--set WB Set white balance Cloudy
-e|--Set AE Set exposure time
-v|--video capture Viedeo of 10s
-u|--uvc start preview on uvc preview
-a|--Set ATE Set Auto exposure
-q|--quit stop preview and quit this app
INFO:please input command(input -q exit this app)
u
INFO:the fixed information is as follow:
INFO:id=
INFO:sem_start=0
INFO:smem_len=2457600
...
INFO:V4L2AllocBuffer
INFO:V4L2AllocBuffer:memoryType_ = 2
INFO:V4L2AllocBuffer:V4L2_MEMORY_USERPTR = 2
INFO:V4L2AllocBuffer:VIDIOC_QUERYBUF = 3226490377
ERROR:error: ioctl VIDIOC_QUERYBUF failed.
ERROR:error: Creatbuffer: V4L2AllocBuffer error
ERROR:main test:V4L2PreviewThread CreatBuffer fail i = 0
原因分析:ioctl(fd, VIDIOC_QUERYBUF, &buf)失败。回过头再看”调试linux L4V2 uvc驱动章节->设置格式申请缓冲区队列”中的报错也是
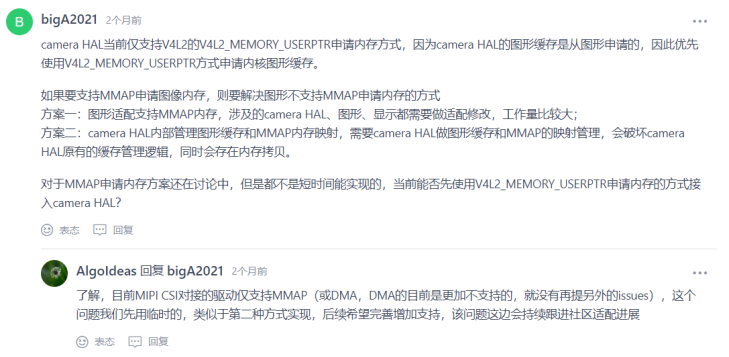
ioctl(fd, VIDIOC_REQBUFS, &reqbuffer)。由此分析出Open Harmony OS上的ioctl VIDIOC_REQBUFS都会报错。再看两次失败的差异点:
内存映射方式不同: V4L2_MEMORY_MMAP和V4L2_MEMORY_USERPTR
从OpenHarmony的issuse得知暂不支持V4L2_MEMORY_MMAP内存映射,映射方式就分析到这里,接下来还是用v4l2_main的V4L2_MEMORY_USERPTR进行调试分析。
参考:V4L2设备增加MMAP申请内存的方式和下图
接着再分析ioctl(fd, VIDIOC_QUERYBUF, &buf)失败,查看VIDIOC_QUERYBUF的定义:videodev2.h
#define VIDIOC_QUERYBUF_IOWR('V', 9, struct v4l2_buffer)
此处插入ioctl的定义:int ioctl(int fd, int cmd, …); VIDIOC_QUERYBUF作为cmd的入参,是int类型。也就是一个数字命令码,该命令码通过ioctl发送给内核后,会有与之对应的函数操作,故用户态下发的命令码应和内核接受的命令码一致。下面验证命令码一致性。
videodev2.h中一共有77个和内核交互的命令码,把内核态和用户态的都打印出来做对比:
用户态加打印:drivers/peripheral
diff --git a/camera/hal/adapter/platform/v4l2/src/driver_adapter/src/v4l2_buffer.cpp b/camera/hal/adapter/platform/v4l2/src/driver_adapter/src/v4l2_buffer.cpp
index d7dd15f..f7254b4 100644
--- a/camera/hal/adapter/platform/v4l2/src/driver_adapter/src/v4l2_buffer.cpp
+++ b/camera/hal/adapter/platform/v4l2/src/driver_adapter/src/v4l2_buffer.cpp
@@ -162,37 +162,119 @@ RetCode HosV4L2Buffers::V4L2DequeueBuffer(int fd)
return RC_OK;
}
+static void cyyanl_printf_cmd(void)
+{
+#if 1
+ CAMERA_LOGD("*************************************************************************************");
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_QUERYCAP ) = 0x%x\n", VIDIOC_QUERYCAP );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_ENUM_FMT ) = 0x%x\n", VIDIOC_ENUM_FMT );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_G_FMT ) = 0x%x\n", VIDIOC_G_FMT );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_S_FMT ) = 0x%x\n", VIDIOC_S_FMT );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_REQBUFS ) = 0x%x\n", VIDIOC_REQBUFS );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_QUERYBUF ) = 0x%x\n", VIDIOC_QUERYBUF );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_G_FBUF ) = 0x%x\n", VIDIOC_G_FBUF );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_S_FBUF ) = 0x%x\n", VIDIOC_S_FBUF );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_OVERLAY ) = 0x%x\n", VIDIOC_OVERLAY );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_QBUF ) = 0x%x\n", VIDIOC_QBUF );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_EXPBUF ) = 0x%x\n", VIDIOC_EXPBUF );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_DQBUF ) = 0x%x\n", VIDIOC_DQBUF );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_STREAMON ) = 0x%x\n", VIDIOC_STREAMON );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_STREAMOFF ) = 0x%x\n", VIDIOC_STREAMOFF );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_G_PARM ) = 0x%x\n", VIDIOC_G_PARM );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_S_PARM ) = 0x%x\n", VIDIOC_S_PARM );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_G_STD ) = 0x%x\n", VIDIOC_G_STD );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_S_STD ) = 0x%x\n", VIDIOC_S_STD );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_ENUMSTD ) = 0x%x\n", VIDIOC_ENUMSTD );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_ENUMINPUT ) = 0x%x\n", VIDIOC_ENUMINPUT );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_G_CTRL ) = 0x%x\n", VIDIOC_G_CTRL );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_S_CTRL ) = 0x%x\n", VIDIOC_S_CTRL );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_G_TUNER ) = 0x%x\n", VIDIOC_G_TUNER );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_S_TUNER ) = 0x%x\n", VIDIOC_S_TUNER );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_G_AUDIO ) = 0x%x\n", VIDIOC_G_AUDIO );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_S_AUDIO ) = 0x%x\n", VIDIOC_S_AUDIO );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_QUERYCTRL ) = 0x%x\n", VIDIOC_QUERYCTRL );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_QUERYMENU ) = 0x%x\n", VIDIOC_QUERYMENU );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_G_INPUT ) = 0x%x\n", VIDIOC_G_INPUT );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_S_INPUT ) = 0x%x\n", VIDIOC_S_INPUT );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_G_EDID ) = 0x%x\n", VIDIOC_G_EDID );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_S_EDID ) = 0x%x\n", VIDIOC_S_EDID );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_G_OUTPUT ) = 0x%x\n", VIDIOC_G_OUTPUT );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_S_OUTPUT ) = 0x%x\n", VIDIOC_S_OUTPUT );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_ENUMOUTPUT ) = 0x%x\n", VIDIOC_ENUMOUTPUT );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_G_AUDOUT ) = 0x%x\n", VIDIOC_G_AUDOUT );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_S_AUDOUT ) = 0x%x\n", VIDIOC_S_AUDOUT );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_G_MODULATOR ) = 0x%x\n", VIDIOC_G_MODULATOR );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_S_MODULATOR ) = 0x%x\n", VIDIOC_S_MODULATOR );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_G_FREQUENCY ) = 0x%x\n", VIDIOC_G_FREQUENCY );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_S_FREQUENCY ) = 0x%x\n", VIDIOC_S_FREQUENCY );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_CROPCAP ) = 0x%x\n", VIDIOC_CROPCAP );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_G_CROP ) = 0x%x\n", VIDIOC_G_CROP );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_S_CROP ) = 0x%x\n", VIDIOC_S_CROP );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_G_JPEGCOMP ) = 0x%x\n", VIDIOC_G_JPEGCOMP );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_S_JPEGCOMP ) = 0x%x\n", VIDIOC_S_JPEGCOMP );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_QUERYSTD ) = 0x%x\n", VIDIOC_QUERYSTD );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_TRY_FMT ) = 0x%x\n", VIDIOC_TRY_FMT );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_ENUMAUDIO ) = 0x%x\n", VIDIOC_ENUMAUDIO );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_ENUMAUDOUT ) = 0x%x\n", VIDIOC_ENUMAUDOUT );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_G_PRIORITY ) = 0x%x\n", VIDIOC_G_PRIORITY );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_S_PRIORITY ) = 0x%x\n", VIDIOC_S_PRIORITY );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_G_SLICED_VBI_CAP ) = 0x%x\n", VIDIOC_G_SLICED_VBI_CAP );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_LOG_STATUS ) = 0x%x\n", VIDIOC_LOG_STATUS );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_G_EXT_CTRLS ) = 0x%x\n", VIDIOC_G_EXT_CTRLS );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_S_EXT_CTRLS ) = 0x%x\n", VIDIOC_S_EXT_CTRLS );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_TRY_EXT_CTRLS ) = 0x%x\n", VIDIOC_TRY_EXT_CTRLS );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_ENUM_FRAMESIZES ) = 0x%x\n", VIDIOC_ENUM_FRAMESIZES );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_ENUM_FRAMEINTERVALS) = 0x%x\n", VIDIOC_ENUM_FRAMEINTERVALS);
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_G_ENC_INDEX ) = 0x%x\n", VIDIOC_G_ENC_INDEX );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_ENCODER_CMD ) = 0x%x\n", VIDIOC_ENCODER_CMD );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_TRY_ENCODER_CMD ) = 0x%x\n", VIDIOC_TRY_ENCODER_CMD );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_S_HW_FREQ_SEEK ) = 0x%x\n", VIDIOC_S_HW_FREQ_SEEK );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_CREATE_BUFS ) = 0x%x\n", VIDIOC_CREATE_BUFS );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_PREPARE_BUF ) = 0x%x\n", VIDIOC_PREPARE_BUF );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_G_SELECTION ) = 0x%x\n", VIDIOC_G_SELECTION );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_S_SELECTION ) = 0x%x\n", VIDIOC_S_SELECTION );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_DECODER_CMD ) = 0x%x\n", VIDIOC_DECODER_CMD );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_TRY_DECODER_CMD ) = 0x%x\n", VIDIOC_TRY_DECODER_CMD );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_ENUM_DV_TIMINGS ) = 0x%x\n", VIDIOC_ENUM_DV_TIMINGS );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_QUERY_DV_TIMINGS ) = 0x%x\n", VIDIOC_QUERY_DV_TIMINGS );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_DV_TIMINGS_CAP ) = 0x%x\n", VIDIOC_DV_TIMINGS_CAP );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_ENUM_FREQ_BANDS ) = 0x%x\n", VIDIOC_ENUM_FREQ_BANDS );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_DBG_G_CHIP_INFO ) = 0x%x\n", VIDIOC_DBG_G_CHIP_INFO );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(VIDIOC_QUERY_EXT_CTRL ) = 0x%x\n", VIDIOC_QUERY_EXT_CTRL );
+ CAMERA_LOGD("cyyanl v4l2 ioctl cmd(BASE_VIDIOC_PRIVATE ) = 0x%x\n", BASE_VIDIOC_PRIVATE );
+ CAMERA_LOGD("*************************************************************************************");
+#endif
+}
+
RetCode HosV4L2Buffers::V4L2AllocBuffer(int fd, const std::shared_ptr<FrameSpec>& frameSpec)
{
struct v4l2_buffer buf = {};
struct v4l2_plane planes[1] = {};
- CAMERA_LOGD("V4L2AllocBuffer\n");
+ CAMERA_LOGD("V4L2AllocBuffer enter\n");
+ cyyanl_printf_cmd();
if (frameSpec == nullptr) {
CAMERA_LOGE("V4L2AllocBuffer frameSpec is NULL\n");
return RC_ERROR;
}
-
switch (memoryType_) {
case V4L2_MEMORY_MMAP:
// to do something
break;
case V4L2_MEMORY_USERPTR:
+ CAMERA_LOGD("V4L2AllocBuffer:V4L2_MEMORY_USERPTR = %d\n", V4L2_MEMORY_USERPTR);
buf.type = bufferType_;
buf.memory = memoryType_;
buf.index = (uint32_t)frameSpec->buffer_->GetIndex();
-
if (bufferType_ == V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE) {
+ CAMERA_LOGD("V4L2AllocBuffer:V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE = %d\n", V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE);
buf.m.planes = planes;
buf.length = 1;
}
内核态打印:kernel/linux/linux-4.19/
diff --git a/drivers/media/usb/uvc/uvc_driver.c b/drivers/media/usb/uvc/uvc_driver.c
index 0842a47c6..8aa60407f 100644
--- a/drivers/media/usb/uvc/uvc_driver.c
+++ b/drivers/media/usb/uvc/uvc_driver.c
@@ -2902,10 +2902,93 @@ struct uvc_driver uvc_driver = {
},
};
+static void cyyanl_printk_cmd(void)
+{
+ printk("*************************************************************************************");
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_QUERYCAP ) = %ld\n", VIDIOC_QUERYCAP );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_ENUM_FMT ) = %ld\n", VIDIOC_ENUM_FMT );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_G_FMT ) = %ld\n", VIDIOC_G_FMT );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_S_FMT ) = %ld\n", VIDIOC_S_FMT );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_REQBUFS ) = %ld\n", VIDIOC_REQBUFS );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_QUERYBUF ) = %ld\n", VIDIOC_QUERYBUF );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_G_FBUF ) = %ld\n", VIDIOC_G_FBUF );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_S_FBUF ) = %ld\n", VIDIOC_S_FBUF );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_OVERLAY ) = %ld\n", VIDIOC_OVERLAY );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_QBUF ) = %ld\n", VIDIOC_QBUF );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_EXPBUF ) = %ld\n", VIDIOC_EXPBUF );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_DQBUF ) = %ld\n", VIDIOC_DQBUF );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_STREAMON ) = %ld\n", VIDIOC_STREAMON );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_STREAMOFF ) = %ld\n", VIDIOC_STREAMOFF );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_G_PARM ) = %ld\n", VIDIOC_G_PARM );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_S_PARM ) = %ld\n", VIDIOC_S_PARM );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_G_STD ) = %ld\n", VIDIOC_G_STD );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_S_STD ) = %ld\n", VIDIOC_S_STD );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_ENUMSTD ) = %ld\n", VIDIOC_ENUMSTD );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_ENUMINPUT ) = %ld\n", VIDIOC_ENUMINPUT );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_G_CTRL ) = %ld\n", VIDIOC_G_CTRL );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_S_CTRL ) = %ld\n", VIDIOC_S_CTRL );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_G_TUNER ) = %ld\n", VIDIOC_G_TUNER );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_S_TUNER ) = %ld\n", VIDIOC_S_TUNER );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_G_AUDIO ) = %ld\n", VIDIOC_G_AUDIO );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_S_AUDIO ) = %ld\n", VIDIOC_S_AUDIO );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_QUERYCTRL ) = %ld\n", VIDIOC_QUERYCTRL );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_QUERYMENU ) = %ld\n", VIDIOC_QUERYMENU );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_G_INPUT ) = %ld\n", VIDIOC_G_INPUT );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_S_INPUT ) = %ld\n", VIDIOC_S_INPUT );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_G_EDID ) = %ld\n", VIDIOC_G_EDID );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_S_EDID ) = %ld\n", VIDIOC_S_EDID );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_G_OUTPUT ) = %ld\n", VIDIOC_G_OUTPUT );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_S_OUTPUT ) = %ld\n", VIDIOC_S_OUTPUT );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_ENUMOUTPUT ) = %ld\n", VIDIOC_ENUMOUTPUT );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_G_AUDOUT ) = %ld\n", VIDIOC_G_AUDOUT );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_S_AUDOUT ) = %ld\n", VIDIOC_S_AUDOUT );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_G_MODULATOR ) = %ld\n", VIDIOC_G_MODULATOR );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_S_MODULATOR ) = %ld\n", VIDIOC_S_MODULATOR );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_G_FREQUENCY ) = %ld\n", VIDIOC_G_FREQUENCY );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_S_FREQUENCY ) = %ld\n", VIDIOC_S_FREQUENCY );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_CROPCAP ) = %ld\n", VIDIOC_CROPCAP );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_G_CROP ) = %ld\n", VIDIOC_G_CROP );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_S_CROP ) = %ld\n", VIDIOC_S_CROP );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_G_JPEGCOMP ) = %ld\n", VIDIOC_G_JPEGCOMP );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_S_JPEGCOMP ) = %ld\n", VIDIOC_S_JPEGCOMP );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_QUERYSTD ) = %ld\n", VIDIOC_QUERYSTD );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_TRY_FMT ) = %ld\n", VIDIOC_TRY_FMT );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_ENUMAUDIO ) = %ld\n", VIDIOC_ENUMAUDIO );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_ENUMAUDOUT ) = %ld\n", VIDIOC_ENUMAUDOUT );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_G_PRIORITY ) = %ld\n", VIDIOC_G_PRIORITY );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_S_PRIORITY ) = %ld\n", VIDIOC_S_PRIORITY );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_G_SLICED_VBI_CAP ) = %ld\n", VIDIOC_G_SLICED_VBI_CAP );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_LOG_STATUS ) = %ld\n", VIDIOC_LOG_STATUS );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_G_EXT_CTRLS ) = %ld\n", VIDIOC_G_EXT_CTRLS );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_S_EXT_CTRLS ) = %ld\n", VIDIOC_S_EXT_CTRLS );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_TRY_EXT_CTRLS ) = %ld\n", VIDIOC_TRY_EXT_CTRLS );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_ENUM_FRAMESIZES ) = %ld\n", VIDIOC_ENUM_FRAMESIZES );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_ENUM_FRAMEINTERVALS) = %ld\n", VIDIOC_ENUM_FRAMEINTERVALS);
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_G_ENC_INDEX ) = %ld\n", VIDIOC_G_ENC_INDEX );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_ENCODER_CMD ) = %ld\n", VIDIOC_ENCODER_CMD );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_TRY_ENCODER_CMD ) = %ld\n", VIDIOC_TRY_ENCODER_CMD );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_S_HW_FREQ_SEEK ) = %ld\n", VIDIOC_S_HW_FREQ_SEEK );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_CREATE_BUFS ) = %ld\n", VIDIOC_CREATE_BUFS );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_PREPARE_BUF ) = %ld\n", VIDIOC_PREPARE_BUF );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_G_SELECTION ) = %ld\n", VIDIOC_G_SELECTION );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_S_SELECTION ) = %ld\n", VIDIOC_S_SELECTION );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_DECODER_CMD ) = %ld\n", VIDIOC_DECODER_CMD );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_TRY_DECODER_CMD ) = %ld\n", VIDIOC_TRY_DECODER_CMD );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_ENUM_DV_TIMINGS ) = %ld\n", VIDIOC_ENUM_DV_TIMINGS );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_QUERY_DV_TIMINGS ) = %ld\n", VIDIOC_QUERY_DV_TIMINGS );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_DV_TIMINGS_CAP ) = %ld\n", VIDIOC_DV_TIMINGS_CAP );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_ENUM_FREQ_BANDS ) = %ld\n", VIDIOC_ENUM_FREQ_BANDS );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_DBG_G_CHIP_INFO ) = %ld\n", VIDIOC_DBG_G_CHIP_INFO );
+ printk("cyyanl v4l2 ioctl cmd(VIDIOC_QUERY_EXT_CTRL ) = %ld\n", VIDIOC_QUERY_EXT_CTRL );
+ printk("cyyanl v4l2 ioctl cmd(BASE_VIDIOC_PRIVATE ) = %ld\n", BASE_VIDIOC_PRIVATE );
+ printk("*************************************************************************************");
+}
+
static int __init uvc_init(void)
{
int ret;
-
+ printk("cyyanl enter uvc_init\n");
+ cyyanl_printk_cmd();
uvc_debugfs_init();
ret = usb_register(&uvc_driver.driver);
打印结果对比:VIDIOC_QUERYBUF用户态为0xc0505609,内核态为0xc0585609 还有其他几处命令码也不同。
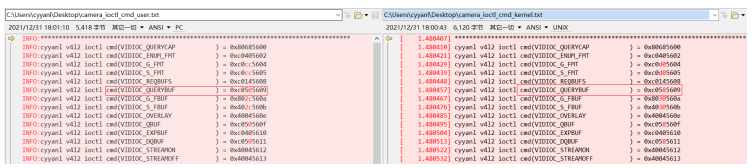
分析命令码不一致问题,先找出VIDIOC_QUERYBUF用户态和内核态实际编译时所定义的地方差异:
用户态:kernel/linux/patches/linux-5.10/prebuilts/usr/include/linux/videodev2.h +1358
内核态:kernel/linux/linux-4.19/include/uapi/linux/videodev2.h +2361
此时怀疑VIDIOC_QUERYBUF不一致是头文件不同所导致(目前没做修改验证同改为linux-4.19是否可行)。对现有问题求助客户,并在OpenHarmony上寻找有无相似问题。
找到了相似的issuse:https://gitee.com/openharmony/drivers_peripheral/issues/I4NI4M?from=project-issue
接下来,调试思路分为2路:
- 同意用户态和内核态的VIDIOC_QUERYBUF
方案:把用户态的0xc0505609改为内核态的0xc0585609
修改点:drivers/peripheral
diff --git a/camera/hal/adapter/platform/v4l2/src/driver_adapter/src/v4l2_buffer.cpp b/camera/hal/adapter/platform/v4l2/src/driver_adapter/src/v4l2_buffer.cpp
index d7dd15f..f7254b4 100644
--- a/camera/hal/adapter/platform/v4l2/src/driver_adapter/src/v4l2_buffer.cpp
+++ b/camera/hal/adapter/platform/v4l2/src/driver_adapter/src/v4l2_buffer.cpp
buf.m.planes = planes;
buf.length = 1;
}
- CAMERA_LOGD("V4L2_MEMORY_USERPTR Print the cnt: %{public}d\n", buf.index);
-
- if (ioctl(fd, VIDIOC_QUERYBUF, &buf) < 0) {
- CAMERA_LOGE("error: ioctl VIDIOC_QUERYBUF failed: %{public}s\n", strerror(errno));
+ if (ioctl(fd, /*VIDIOC_QUERYBUF*/0xc0585609, &buf) < 0) {
+ CAMERA_LOGE("error: ioctl VIDIOC_QUERYBUF failed.\n");
return RC_ERROR;
}
再次运行v4l2_main结果:Signal 4报错
原因分析:此时ioctl(fd, /VIDIOC_QUERYBUF/0xc0585609, &buf) 已经成功了。Signal 4分析可能又是cmd命令码的问题。
此路虽然解决了当前问题,但会有新问题Signal 4,故先暂停。
INFO:main test:allocating display buffer memory
INFO:main test:do_mmap: pmem mmap fd 5 ptr 0xf7508000 len 2457600
INFO:V4L2OpenDevice /dev/video10
INFO:V4L2ReqBuffers buffCont 4
INFO:Creatbuffer frameSpec->buffer index == 0
INFO:V4L2AllocBuffer
Signal 4
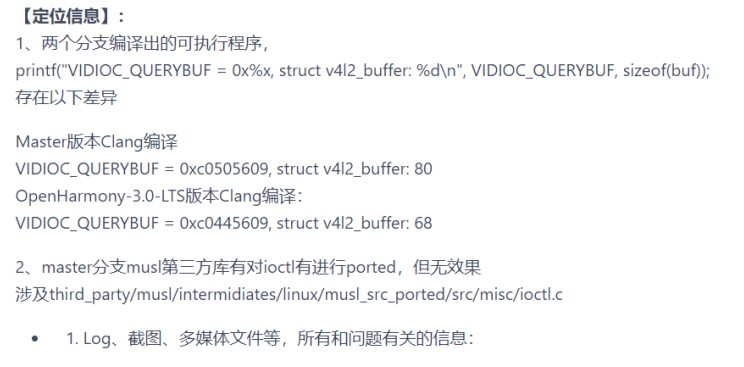
- 分析命令码不一致的根因,并做修改
根因分析:结构体的大小根据32位与64位编译会产生差异,从而影响VIDIOC_QUERYBUF的值。
修改点:修改用户态编译v4l2_buffer结构体的timestamp定义,并将用户态编译的头文件#include
修改过的videodev2.h,即#include ”videodev2.h“。(实际操作为把修改后的videodev2.h拷贝到v4l2_main编译目录中)
kernel/linux/linux-4.19/
diff --git a/include/uapi/linux/videodev2.h b/include/uapi/linux/videodev2.h
index ba548d7f0..b0fb48f65 100644
--- a/include/uapi/linux/videodev2.h
+++ b/include/uapi/linux/videodev2.h
@@ -958,13 +958,20 @@ struct v4l2_plane {
* Contains data exchanged by application and driver using one of the Streaming
* I/O methods.
*/
+
+struct timeval_user {
+ long tv_sec;
+ long tv_usec;
+};
+
struct v4l2_buffer {
__u32 index;
__u32 type;
__u32 bytesused;
__u32 flags;
__u32 field;
- struct timeval timestamp;
+ //struct timeval timestamp;
+ struct timeval_user timestamp;
struct v4l2_timecode timecode;
__u32 sequence;
drivers/peripheral
diff --git a/camera/hal/adapter/chipset/rpi/rpi3/device/camera/src/driver_adapter/main_test/project_v4l2_main.h b/camera/hal/adapter/chipset/rpi/rpi3/device/camera/src/driver_adapter/main_test/project_v4l2_main.h
index 00ddea7..962ebc3 100755
--- a/camera/hal/adapter/chipset/rpi/rpi3/device/camera/src/driver_adapter/main_test/project_v4l2_main.h
+++ b/camera/hal/adapter/chipset/rpi/rpi3/device/camera/src/driver_adapter/main_test/project_v4l2_main.h
@@ -15,7 +15,8 @@
#ifndef HOS_CAMERA_PROJET_HARDWARE_H
#define HOS_CAMERA_PROJET_HARDWARE_H
-#include <linux/videodev2.h>
+//#include <linux/videodev2.h>
+#include "videodev2.h"
namespace OHOS::Camera {
#define PREVIEW_PIXEL_FORMAT V4L2_PIX_FMT_YUV420
diff --git a/camera/hal/adapter/platform/v4l2/src/driver_adapter/include/v4l2_buffer.h b/camera/hal/adapter/platform/v4l2/src/driver_adapter/include/v4l2_buffer.h
index 6f45882..a8d6819 100644
--- a/camera/hal/adapter/platform/v4l2/src/driver_adapter/include/v4l2_buffer.h
+++ b/camera/hal/adapter/platform/v4l2/src/driver_adapter/include/v4l2_buffer.h
@@ -19,7 +19,8 @@
#include <mutex>
#include <map>
#include <cstring>
-#include <linux/videodev2.h>
+//#include <linux/videodev2.h>
+#include "videodev2.h"
#include <sys/ioctl.h>
#include "v4l2_common.h"
#if defined(V4L2_UTEST)||defined (V4L2_MAIN_TEST)
diff --git a/camera/hal/adapter/platform/v4l2/src/driver_adapter/include/v4l2_control.h b/camera/hal/adapter/platform/v4l2/src/driver_adapter/include/v4l2_control.h
index 5b93f36..05191a7 100644
--- a/camera/hal/adapter/platform/v4l2/src/driver_adapter/include/v4l2_control.h
+++ b/camera/hal/adapter/platform/v4l2/src/driver_adapter/include/v4l2_control.h
@@ -16,7 +16,8 @@
#ifndef HOS_CAMERA_V4L2_CONTROL_H
#define HOS_CAMERA_V4L2_CONTROL_H
-#include <linux/videodev2.h>
+//#include <linux/videodev2.h>
+#include "videodev2.h"
#include <errno.h>
#include <sys/ioctl.h>
#include "v4l2_common.h"
diff --git a/camera/hal/adapter/platform/v4l2/src/driver_adapter/include/v4l2_dev.h b/camera/hal/adapter/platform/v4l2/src/driver_adapter/include/v4l2_dev.h
index 10dc9b4..e3b3056 100644
--- a/camera/hal/adapter/platform/v4l2/src/driver_adapter/include/v4l2_dev.h
+++ b/camera/hal/adapter/platform/v4l2/src/driver_adapter/include/v4l2_dev.h
@@ -19,7 +19,8 @@
#include <mutex>
#include <thread>
#include <vector>
-#include <linux/videodev2.h>
+//#include <linux/videodev2.h>
+#include "videodev2.h"
#include <sys/epoll.h>
#include <sys/ioctl.h>
#include <sys/types.h>
diff --git a/camera/hal/adapter/platform/v4l2/src/driver_adapter/include/v4l2_fileformat.h b/camera/hal/adapter/platform/v4l2/src/driver_adapter/include/v4l2_fileformat.h
index de892e9..44bb1b4 100644
--- a/camera/hal/adapter/platform/v4l2/src/driver_adapter/include/v4l2_fileformat.h
+++ b/camera/hal/adapter/platform/v4l2/src/driver_adapter/include/v4l2_fileformat.h
@@ -19,7 +19,8 @@
#include <vector>
#include <cstring>
#include <fcntl.h>
-#include <linux/videodev2.h>
+//#include <linux/videodev2.h>
+#include "videodev2.h"
#include <sys/ioctl.h>
#include <sys/stat.h>
#include <unistd.h>
diff --git a/camera/hal/adapter/platform/v4l2/src/driver_adapter/include/v4l2_uvc.h b/camera/hal/adapter/platform/v4l2/src/driver_adapter/include/v4l2_uvc.h
index 1a62f37..96c70aa 100644
--- a/camera/hal/adapter/platform/v4l2/src/driver_adapter/include/v4l2_uvc.h
+++ b/camera/hal/adapter/platform/v4l2/src/driver_adapter/include/v4l2_uvc.h
@@ -18,7 +18,8 @@
#include <thread>
#include <fcntl.h>
#include <linux/netlink.h>
-#include <linux/videodev2.h>
+//#include <linux/videodev2.h>
+#include "videodev2.h"
#include <sys/ioctl.h>
#include <sys/select.h>
#include <linux/netlink.h>zz
diff --git a/camera/hal/adapter/platform/v4l2/src/driver_adapter/main_test/v4l2_main.cpp b/camera/hal/adapter/platform/v4l2/src/driver_adapter/main_test/v4l2_main.cpp
index b351f49..5483b85 100755
--- a/camera/hal/adapter/platform/v4l2/src/driver_adapter/main_test/v4l2_main.cpp
+++ b/camera/hal/adapter/platform/v4l2/src/driver_adapter/main_test/v4l2_main.cpp
@@ -22,7 +22,8 @@
#include <sys/mman.h>
#include <sys/time.h>
#include <linux/fb.h>
-#include <linux/videodev2.h>
+//#include <linux/videodev2.h>
+#include "videodev2.h"
#include "securec.h"
#include "v4l2_uvc.h"
#include "v4l2_dev.h"
diff --git a/camera/hal/adapter/platform/v4l2/src/driver_adapter/src/v4l2_stream.cpp b/camera/hal/adapter/platform/v4l2/src/driver_adapter/src/v4l2_stream.cpp
index 778cf05..96618be 100644
--- a/camera/hal/adapter/platform/v4l2/src/driver_adapter/src/v4l2_stream.cpp
+++ b/camera/hal/adapter/platform/v4l2/src/driver_adapter/src/v4l2_stream.cpp
@@ -14,7 +14,8 @@
*/
#include <cstring>
-#include <linux/videodev2.h>
+//#include <linux/videodev2.h>
+#include "videodev2.h"
#include <sys/ioctl.h>
#include "v4l2_stream.h"
diff --git a/camera/hal/test/v4l2/include/test_display.h b/camera/hal/test/v4l2/include/test_display.h
index d437e26..8e5205e 100644
--- a/camera/hal/test/v4l2/include/test_display.h
+++ b/camera/hal/test/v4l2/include/test_display.h
@@ -44,7 +44,8 @@
#include <errno.h>
#include <getopt.h>
#include <linux/fb.h>
-#include <linux/videodev2.h>
+//#include <linux/videodev2.h>
+#include "videodev2.h"
#include <mutex>
#include <pthread.h>
#include <stdlib.h>
@@ -138,4 +139,4 @@ public:
void StartCapture(int streamId, int captureId, bool shutterCallback, bool isStreaming);
float calTime(struct timeval start, struct timeval end);
};
-#endif
\ No newline at end of file
+#endif
再次编译v4l2_main后执行,log无报错。HDMI屏上就显示预览画面。
回过头来再看整个调试流程,发现该摄像头支持YUYV格式和MJPEG格式,查看v4l2_main中默认预览用的是YUYV,改为MJPEG再次调试。
修改点:
diff --git a/camera/hal/adapter/platform/v4l2/src/driver_adapter/main_test/v4l2_main.cpp b/camera/hal/adapter/platform/v4l2/src/driver_adapter/main_test/v4l2_main.cpp
index b351f49..5483b85 100755
--- a/camera/hal/adapter/platform/v4l2/src/driver_adapter/main_test/v4l2_main.cpp
+++ b/camera/hal/adapter/platform/v4l2/src/driver_adapter/main_test/v4l2_main.cpp
@@ -394,7 +395,9 @@ void V4L2SetDeviceFormat(DeviceFormat& format, const std::string devname)
if (devname == "uvcvideo"||devname == "uvcvideo1") {
if (g_isPreviewOnUvc) {
- format.fmtdesc.pixelformat = V4L2_PIX_FMT_YUYV;
+ CAMERA_LOGD("cyyanl enter V4L2SetDeviceFormat : g_isPreviewOnUvc\n");
+ //format.fmtdesc.pixelformat = V4L2_PIX_FMT_YUYV;
+ format.fmtdesc.pixelformat = V4L2_PIX_FMT_MJPEG;
format.fmtdesc.width = width;
format.fmtdesc.height = height;
}
v4l2_main执行结果:该显示异常,目前先不分析MJPEG格式。
到此为止,v4l2_main运行正常,可以预览(预览画面色彩异常与屏幕显示格式有关,暂不做修改)。接下来调试拍照和录像。
执行v4l2_main后,先输入u进行uvc预览,再运行c进行拍照,再运行v进行录像,照片和录像文件生成到当前执行的路径下:
# ls -l *.jpeg
-rwxrw-rw- 1 root 29034400 614400 2013-01-18 15:20 UVC0.jpeg
-rwxrw-rw- 1 root 29034400 614400 2013-01-18 15:20 UVC1.jpeg
-rwxrw-rw- 1 root 29034400 614400 2013-01-18 15:20 UVC2.jpeg
-rwxrw-rw- 1 root 29034400 614400 2013-01-18 15:20 UVC3.jpeg
#
# ls -l *.h264
-rwxrw-rw- 1 root 29034400 85401600 2013-01-18 15:20 uvc.h264
将如上文件导出到电脑端查看:
照片uvc0.jpeg
录像uvc.h264在手机端可查看,播放正常。
附录
/**
* struct v4l2_buffer - video buffer info
* @index: id number of the buffer
* @type: enum v4l2_buf_type; buffer type (type == *_MPLANE for
* multiplanar buffers);
* @bytesused: number of bytes occupied by data in the buffer (payload);
* unused (set to 0) for multiplanar buffers
* @flags: buffer informational flags
* @field: enum v4l2_field; field order of the image in the buffer
* @timestamp: frame timestamp
* @timecode: frame timecode
* @sequence: sequence count of this frame
* @memory: enum v4l2_memory; the method, in which the actual video data is
* passed
* @offset: for non-multiplanar buffers with memory == V4L2_MEMORY_MMAP;
* offset from the start of the device memory for this plane,
* (or a "cookie" that should be passed to mmap() as offset)
* @userptr: for non-multiplanar buffers with memory == V4L2_MEMORY_USERPTR;
* a userspace pointer pointing to this buffer
* @fd: for non-multiplanar buffers with memory == V4L2_MEMORY_DMABUF;
* a userspace file descriptor associated with this buffer
* @planes: for multiplanar buffers; userspace pointer to the array of plane
* info structs for this buffer
* @length: size in bytes of the buffer (NOT its payload) for single-plane
* buffers (when type != *_MPLANE); number of elements in the
* planes array for multi-plane buffers
*
* Contains data exchanged by application and driver using one of the Streaming
* I/O methods.
*/
struct v4l2_buffer {
__u32 index;
__u32 type;
__u32 bytesused;
__u32 flags;
__u32 field;
struct timeval timestamp;
struct v4l2_timecode timecode;
__u32 sequence;
/* memory location */
__u32 memory;
union {
__u32 offset;
unsigned long userptr;
struct v4l2_plane *planes;
__s32 fd;
} m;
__u32 length;
__u32 reserved2;
__u32 reserved;
}
TP
TP驱动模型
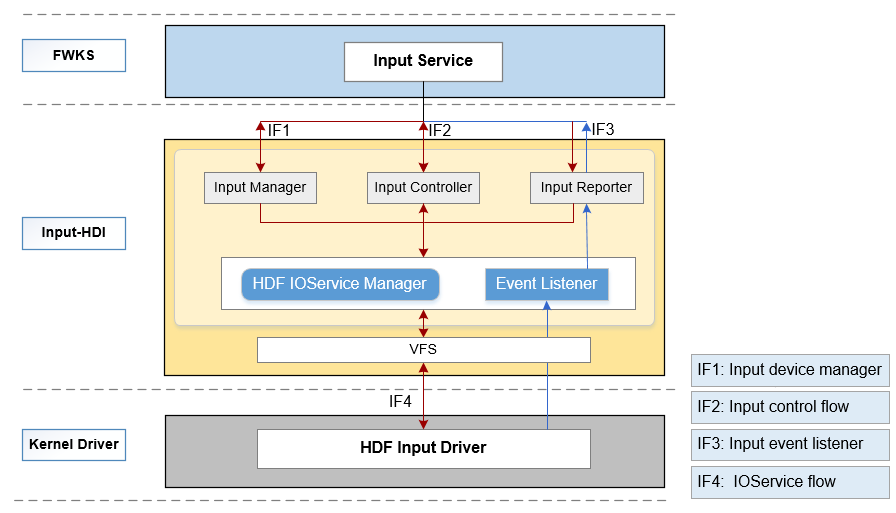
主要包含Input模块HDI(Hardware Driver Interface)接口定义及其实现,对上层输入服务提供操作input设备的驱动能力接口,HDI接口主要包括如下三大类:
- InputManager:管理输入设备,包括输入设备的打开、关闭、设备列表信息获取等;
- InputReporter:负责输入事件的上报,包括注册、注销数据上报回调函数等;
- InputController:提供input设备的业务控制接口,包括获取器件信息及设备类型、设置电源状态等。
图 1 INPUT模块HDI接口层框架图
相关目录下源代码目录结构如下所示
/drivers/peripheral/input
├── hal # input模块的hal层代码
│ └── include # input模块hal层内部的头文件
│ └── src # input模块hal层代码的具体实现
├── interfaces # input模块对上层服务提供的驱动能力接口
│ └── include # input模块对外提供的接口定义
├── test # input模块的测试代码
│ └── unittest # input模块的单元测试代码
详细请参考input子系统README
TP HDF驱动适配
配置适配
关闭linux tp驱动开关,在
# CONFIG_TOUCHSCREEN_GT9XX is not set
驱动适配
- 在vendor/rockchip/rk3399/hdf_config/khdf/device_info/device_info.hcs修改或增加如下内容
device_touch_chip :: device {
device0 :: deviceNode {
policy = 0;
priority = 130;
preload = 0;
permission = 0660;
moduleName = "HDF_TOUCH_GT911";
serviceName = "hdf_touch_gt911_service";
deviceMatchAttr = "zsj_gt911_5p5";
}
}
- 在vendor/rockchip/rk3399/hdf_config/khdf/input/input_config.hcs修改或增加如下内容
busConfig {
// 0:i2c 1:spi
busType = 0; // I2C通信方式
busNum = 7; // cpu对应touch芯片的I2C编号
clkGpio = 72; // I2C clk对应的IO引脚编号
dataGpio = 71; // I2C data对应的IO引脚标号
i2cClkIomux = [0xFF77E004, 0x2]; // I2C [clk引脚对应的复用寄存器,配置为I2C7_clk功能]
i2cDataIomux = [0xFF77E000, 0x8000]; // I2C [data引脚对应的复用寄存器,配置为I2C7_DATA功能]
}
pinConfig {
rstGpio = 150; // touch芯片rst对应的IO引脚编号
intGpio = 52; // touch芯片int对应的IO引脚编号
rstRegCfg = [0xFF77E028, 0x00000000]; // rst引脚对应的复用功能寄存器,配置为普通io口
intRegCfg = [0xFF770018, 0x00000000]; // int引脚对应的复用功能寄存器,配置为普通io口
}
FAQ问题
解决触屏横竖反转问题
修改drivers/framework/model/input/driver/touchscreen/touch_gt911.c中的ParsePointData函数,x和y对调即可
InputPinMuxCfg函数修改
static int32_t InputPinMuxCfg(uint32_t regAddr, int32_t regSize, uint32_t regValue)
{
uint8_t *base = NULL;
uint32_t data = 0;
if (regAddr == 0) {
HDF_LOGE("%s: regAddr invalid", __func__);
return HDF_FAILURE;
}
HDF_LOGE("regAddr = 0x%x, regSize = 0x%x", regAddr, regSize);
base = OsalIoRemap(regAddr, regSize);
if (base == NULL) {
HDF_LOGE("%s: ioremap failed", __func__);
return HDF_FAILURE;
}
// 写入寄存器前先读出数据,保存原有的配置,方式修改原有的其他引脚功能配置。
data = OSAL_READL(base);
data|= regValue;
OSAL_WRITEL(data, base);
OsalIoUnmap((void *)base);
return HDF_SUCCESS;
}
RK3399引脚GPIOn_KX 编号号确认方法
num = 32n+(K-A)8+X
# GPIO1_B2 = 1 * 32 + (B-A)*8 + 2 = 32 + 8 + 1 = 42
| 功能 | IO名称 | IO编号 |
|---|---|---|
| TP_INT | GPIO1_C4 | 52 |
| TP_RST | GPIO4_C6 | 150 |
| TP_SDA | GPIO2_A7 | 71 |
| TP_SCL | GPIO2_B0 | 72 |
RK3399引脚GPIOn_KX复用功能配置
- GPIO复用功能寄存器基地址FF77_0000
- 找到GPIOn_K复用功能寄存器偏移量
- 确定GPIOn_K复用功能寄存器,基地址+偏移量
- 根据复用功能寄存器介绍,写入对应引脚的复用功能
| 功能 | IO名称 | 复用寄存器地址 | 控制位 | 对应数值 |
|---|---|---|---|---|
| TP_INT | GPIO1_C4 | 0xFF770018 | 9:8 | 2’b00:GPIO |
| TP_RST | GPIO4_C6 | 0xFF77E028 | 13:12 | 2’b00:GPIO |
| TP_SDA | GPIO2_A7 | 0xFF77E000 | 15:14 | 2’b10: i2c7nfc_sda |
| TP_SCL | GPIO2_B0 | 0xFF77E004 | 1:0 | 2’b10: i2c7nfc_scl |
你可能感兴趣的鸿蒙文章
harmony 鸿蒙物联网解决方案之芯海cst85芯片移植案例
harmony 鸿蒙标准系统方案之瑞芯微RK3568移植案例
- 所属分类: 后端技术
- 本文标签:
热门推荐
-
2、 - 优质文章
-
3、 gate.io
-
8、 golang
-
9、 openharmony
-
10、 Vue中input框自动聚焦