harmony 鸿蒙Mini-System Devices with Screens – Bestechnic SoC Porting Case
Mini-System Devices with Screens – Bestechnic SoC Porting Case
This document exemplifies the porting procedure for a development board on a mini-system device with a screen – an intelligent switch panel. It uses the BES multi-modal V200Z-R development board powered by the Bestechnic BES2600W SoC as an example. Components such as ace_engine_lite, arkui_ui_lite, aafwk_lite, appexecfwk_lite, and HDF are adapted based on the OpenHarmony LiteOS-M kernel. This example uses the board-SoC separation solution as the porting architecture, the Newlib C or Musl C library as the toolchain, and GN and Kconfig graphical configuration for LiteOS-M kernel compilation.
Compilation and Building
Directory Planning
This example uses an improved SoC porting architecture. The original SoC adaptation directory is as follows:
device
└── <device_company>
└── <device_name>
This adaptation directory has a downside: To use the Hi3861 SoC on the BearPi-HM Nano or HiSpark Pegasus development board, you need to place a copy of the code in the directory of both development boards. To solve this problem, the board vendor is decoupled from the SoC vendor in this example, by following the board-SoC decoupling design ideas. The SoC adaptation directory used in this example is as follows:
device
├── board --- Board vendor directory
│ └── fnlink --- Board vendor name: Fn-Link
│ └── v200zr --- Board name: v200zr
└── soc --- SoC vendor directory
└── bestechnic --- SoC vendor: Bestechnic
└── bes2600 --- SoC Series: The bes2600 series includes bes2600w.
The planned product demo directory is as follows:
vendor
└── bestechnic --- Vendor of the product demo.
└── display_demo --- Product demo name.
Precompilation Adaptation
Before porting, you need to perform precompilation adaptation.
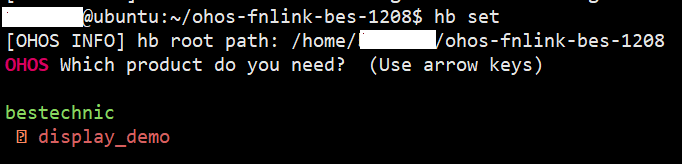
To do so, use the hb set command to set environment variables such as the root directory, board directory, product directory, and board company name of the entire project.
The specific procedure is as follows:
- Add the
config.jsonfile to thevendor/bestechnic/display_demodirectory to describe the board and kernel information used by the product demo. The following is an example of the description:
{
"product_name": "display_demo", --- Product name to display in the hb set drop-down list.
Type of the "type": "mini", --- Build system type, which can mini, small, or standard.
Version of the "version": "3.0", --- Build system version, which can be 1.0, 2.0, or 3.0.
"device_company": "fnlink", --- Board vendor name, which is used to find the /device/board/fnlink directory during compilation.
"board": "v200zr", --- Board name, which is used to find the /device/board/fnlink/v200zr directory during compilation.
"kernel_type": "liteos_m", --- Kernel type. OpenHarmony supports multiple kernels, and one board may be adapted to multiple kernels. Therefore, you need to specify a kernel for compilation.
"kernel_version": "3.0.0", --- Kernel version. A board may be adapted to multiple Linux kernel versions. Therefore, you need to specify a kernel version for compilation.
"subsystems": [ ] --- Subsystem to be compiled and built.
}
- Add the
config.gnifile to thedevice/board/fnlink/v200zr/liteos_mdirectory to describe the board and kernel used in the product demo. The following is an example of the description:
# Kernel type, e.g. "linux", "liteos_a", "liteos_m".
kernel_type = "liteos_m" --- Kernel type, which corresponds to kernel_type in the config.json file.
# Kernel version.
kernel_version = "3.0.0" --- Kernel version, which corresponds to kernel_version in the config.json file.
- Verify the
hb setconfiguration:
Run the hb set command, enter the project root directory, and press Enter. The hb command traverses all config.json files in the //vendor/<product_company>/<product_name> directory and provides product compilation options. In the config.json file, product_name indicates the product name, device_company and board are used to locate the //device/board/<device_company>/<board> directory and find the matching <any_dir_name>/config.gni file. If multiple file matches are found, it indicates that the board has been adapted to multiple kernels. In this case, kernel_type and kernel_version in the config.json file can be used to uniquely match the config.gni file and thereby determine the board with which kernel needs to be compiled and adapted. If the information shown below is displayed, the hb set configuration is correct.
You can run the `hb env` command to view the selected precompilation environment variables.

Before running the hb build command, complete the LiteOS-M kernel adaptation. For details, see Kernel Porting.
Kernel Porting
To port the kernel, you need to complete the LiteOS-M Kconfig adaptation, GN compilation and building, and minimum adaptation for kernel startup.
LiteOS-M Kconfig Adaptation
Run the make menuconfig command in the //kernel/liteos_m directory to select compilation configuration options. In the Makefile file, the hb env result is converted into environment variables, that is, PRODUCT_PATH, DEVICE_PATH, and BOARD_COMPANY. The sample code is as follows:
$(foreach line,$(shell hb env|sed 's/\[OHOS INFO\]/ohos/g;s/ /_/g;s/:_/=/g'||true),$(eval $(line)))
ifneq ($(ohos_kernel),liteos_m)
$(error The selected product ($(ohos_product)) is not a liteos_m kernel type product)
endif
--- Convert each line of hb env to a variable. For example, convert [OHOS INFO] device company: fnlink to ohos_device_company=fnlink.
...
ifeq ($(BOARD_COMPANY),)
BOARD_COMPANY:=$(ohos_device_company)
endif
...
export BOARD_COMPANY
--- Convert ohos_device_company to the BOARD_COMPANY environment variable.
Use the exported environment variables in the //kernel/liteos_m/Kconfig file. Kconfiglib uses ulfalizer to develop the Python-based version. In the source code, as described in function description, the keyword orsource is used. In this keyword, o indicates optional, that is, the file is optional. r indicates relative, that is, the path of the file relative to the current file.
config SOC_COMPANY
string "SoC company name to locate soc build path"
help
This option specifies the SoC company name, used to locate the build path for soc. This option is set by the
SoC's Kconfig file, and should be exactly the same with SoC company path, and the user should generally avoid
modifying it via the menu configuration.
orsource "../../device/board/*/Kconfig.liteos_m.shields" --- Load the configurations of all extension boards. To allow the extension boards provided by board vendor A to be used by board vendor B, the asterisk (*) instead of BOARD_COMPANY is used. As OpenHarmony supports the multi-kernel design, the Kconfig file uses liteos_m as the suffix. During board adaptation, the actual kernel name can be used as the suffix for extension during kernel adaptation.
orsource "../../device/board/$(BOARD_COMPANY)/Kconfig.liteos_m.defconfig.boards" --- Load all predefined board configurations of BOARD_COMPANY.
choice
prompt "Board Selection"
The orsource "../../device/board/$(BOARD_COMPANY)/Kconfig.liteos_m.boards" --- Provide a list of available boards.
endchoice
orsource "../../device/soc/*/Kconfig.liteos_m.defconfig" --- Load the default configuration definitions of all SoCs.
choice
prompt "SoC Series Selection"
orsource "../../device/soc/*/Kconfig.liteos_m.series" --- Provide a list of available SoC series.
endchoice
orsource "../../device/soc/*/Kconfig.liteos_m.soc" --- Load all SoC configurations.
According to the //kernel/liteos_m/Kconfig file, the following Kconfig files need to be added to the //device/board/fnlink directory for adaptation:
.
├── v200zr --- Configuration of the v200zr
│ ├── Kconfig.liteos_m.board --- Configuration options of the v200zr board
│ ├── Kconfig.liteos_m.defconfig.board --- Default configuration items of the v200zr board
│ └── liteos_m
│ └── config.gni
├── Kconfig.liteos_m.boards --- Board configuration of Fn-Link
├── Kconfig.liteos_m.defconfig.boards --- Default board configuration of Fn-Link
├── Kconfig.liteos_m.shields --- Extension board configuration of Fn-Link
└── shields --- Extension board directory of Fn-Link
├── v200zr-t0 --- Expansion board v200zr-t0 of Fn-Link
│ ├── Kconfig.liteos_m.defconfig.shield --- Default configuration of the expansion board v200zr-t0
│ └── Kconfig.liteos_m.shield --- Configuration of the expansion board v200zr-t0
├── v200zr-t1
│ ├── Kconfig.liteos_m.defconfig.shield
│ └── Kconfig.liteos_m.shield
└── Kconfig.liteos_m.shields
In v200zr/Kconfig.liteos_m.board, you need to set the board configuration options and the dependent SoC as follows:
config BOARD_v200zr
bool "select board v200zr"
depends on SOC_BES2600W --- The v200zr board uses the bes2600w SoC. Therefore, the v200zr board configuration options are available only when the bes2600w SoC is selected.
In v200zr/Kconfig.liteos_m.defconfig.board, the default name of BOARD is defined as "v200zr".
if BOARD_v200zr
config BOARD
string --- No content is defined for string. Therefore, it is not visible to users.
default "v200zr"
endif # BOARD_v200zr
According to the //kernel/liteos_m/Kconfig file, the following Kconfig files need to be added to the //device/soc/bestechnic directory for adaptation:
.
├── bes2600 --- bes2600 SoC series
│ ├── Kconfig.liteos_m.defconfig.bes2600w --- Configuration of the bes2600w SoC series provided by Bestechnic
│ ├── Kconfig.liteos_m.defconfig.series --- Default configuration of the bes2600 provided by Bestechnic
│ ├── Kconfig.liteos_m.series --- Configuration of the bes2600 SoC series provided by Bestechnic
│ └── Kconfig.liteos_m.soc --- Configuration of the bes2600 SoC provided by Bestechnic
├── Kconfig.liteos_m.defconfig --- Default SoC configuration of Bestechnic
├── Kconfig.liteos_m.series --- Configuration of the SoC series provided by Bestechnic
└── Kconfig.liteos_m.soc --- Configuration of the SoC provided by Bestechnic
In the bes2600/Kconfig.liteos_m.series file, configure the bes2600 SoC series and SoC architecture as follows:
config SOC_SERIES_BES2600 --- bes2600 SoC series configuration options
bool "Bestechnic 2600 Series"
select ARM --- When bes2600 is selected, the ARM architecture is selected by default.
select SOC_COMPANY_BESTECHNIC --- When bes2600 is selected, bestechnic is selected by default. The driver depends on the macro configuration. You can select the configuration to compile the driver of the corresponding vendor.
select CPU_CORTEX_M33 --- When bes2600 is selected, cortex-m33 CPU is selected by default.
help
Enable support for Bestechnic 2600 series
In the bes2600/Kconfig.liteos_m.soc file, provide the number of specific SoCs under the bes2600 SoC series as follows:
choice
prompt "Bestechnic 2600 series SoC"
depends on SOC_SERIES_BES2600 --- The following configuration options are displayed only when bes2600 Series is selected:
config SOC_BES2600W --- Add the bes2600w SoC configuration option.
bool "SoC BES2600w"
endchoice
In the bes2600/Kconfig.liteos_m.defconfig.series file, provide the following configuration that is used by default when the bes2600 SoC series is selected:
if SOC_SERIES_BES2600 --- The following default configuration options are added only when the bes2600 series is selected:
rsource "Kconfig.liteos_m.defconfig.bes2600w" --- Add the default configuration that is used by default when bes2600 SoC series is selected.
config SOC_SERIES --- Add the configuration that is used by default when SOC_SERIES is selected:
string
default "bes2600"
endif
When the configuration is complete, set the defconfig storage path of make menuconfig based on the kernel/liteos_m/Makefile file.
ifeq ($(TEE:1=y),y)
tee = _tee
endif
ifeq ($(RELEASE:1=y),y)
CONFIG ?= $(PRODUCT_PATH)/kernel_configs/release$(tee).config
else
CONFIG ?= $(PRODUCT_PATH)/kernel_configs/debug$(tee).config --- The configuration file is saved in $(CONFIG) and is defined by the product.
endif
...
update_config menuconfig:
$(HIDE)test -f "$(CONFIG)" && cp -v "$(CONFIG)" .config && menuconfig $(args) && savedefconfig --out "$(CONFIG)"
In this example, the configuration file of defconfig is saved in $(PRODUCT_PATH)/kernel_configs/debug.config. It is empty by default upon creation. The directory and file structure of the product is as follows:
.
└── display_demo
├── config.json
└── kernel_configs
└── debug.config
When the configuration is complete, run the make menuconfig command in the kernel/liteos_m directory to select SoC Series/SoC/Board.

The result is automatically saved in $(PRODUCT_PATH)/kernel_configs/debug.config and will be exported when make menuconfig is executed.
GN Build Adaptation
The graphical configuration result of Kconfig generated in the previous step can be used as the input of GN build to determine whether to build different modules. In addition, to solve the problem of arbitrary use of include during GN build, modular compilation is used for kernel compilation, streamlining the entire compilation logic. For details, see LiteOS-M Kernel BUILD.gn Compilation Guide.
In the kernel/liteos_m/BUILD.gn file, the compilation entrances of Board and SoC are specified as //device/board/fnlink and //device/soc/bestechnic.
deps += [ "//device/board/$device_company" ]
deps += [ "//device/soc/$LOSCFG_SOC_COMPANY" ]
Add the following content to //device/board/fnlink/BUILD.gn:
if (ohos_kernel_type == "liteos_m") { --- In the multi-kernel design, macros need to be used to isolate the adapted LiteOS-M kernel.
import("//kernel/liteos_m/liteos.gni") --- Import the kernel GN template.
module_name = get_path_info(rebase_path("."), "name") --- Dynamically obtain the current directory and use it as the module name, eliminating the need for manual synchronization between the directory and module name.
module_group(module_name) { --- Use the module_group template.
modules = [ --- Add the modules to be built.
]
}
}
Modify the //device/soc/bestechnic/BUILD.gn file in a similar manner.
Kernel Boot Adaptation
The system boot process consists of three phases:
| Phase | Partitioning Planning | Description |
|---|---|---|
| BOOT1 | [0, 0x10000] | The firmware is started. |
| BOOT2 | [0x2C010000, 0x2C020000] | The OTA update starts. |
| RTOS_MAIN | [0x2C080000, 0x2C860000] | The kernel is started. |
In the third phase where the kernel is started, the file to be adapted is saved in //device/soc/bestechnic/bes2600/liteos_m/sdk/bsp/rtos/liteos/liteos_m/board.c.
The general idea of kernel boot adaptation is as follows:
os_vector_initis used to initialize interrupt vectors and interrupt processing functions.osKernelInitializeis used to initialize the kernel.- The
board_mainthread is created to initialize the chip platform. - The kernel starts up and schedules the
osKernelStartthread.
This section describes step 3 in detail. Other steps involve invoking of kernel functions and are not described here.
In step 3, before starting OHOS_SystemInit, board_main needs to complete the necessary actions as follows:
...
if(!ret) {
...
OhosSystemAdapterHooks(); --- Configure the hook during system boot and complete the printing and driver initialization before OHOS_SystemInit is started.
...
OHOS_SystemInit(); --- Start the OpenHarmony service and initialize components.
}
....
The OhosSystemAdapterHooks function is in the device/soc/bestechnic/bes2600/liteos_m/components/utils/src/hm_sys.c file, as shown below:
int OhosSystemAdapterHooks(void)
{
init_trace_system(); --- Initialize the printing function.
DeviceManagerStart(); --- Call the DeviceManagerStart function to initialize the HDF driver. This process is implemented by calling the driver configuration file hdf.hcs in the board code and implementing the drivers source code.
return 0;
}
littlefs File System Porting
The V200Z-R development board uses the Nor Flash that supports XIP and has a maximum size of 32 MB. The example file system can be used. During the adaptation, place the file system configuration file in the specified path. The file system image is then automatically generated based on the configuration and packaged into the burning package.
- Specify the directory for storing the file system
config.jsonby usingflash_partition_dir.
"flash_partition_dir": "fs" --- Store the file system configuration file in the vendor/bestechnic/display_demo/fs directory.
Place the following items in the
vendor/bestechnic/display_demo/fsdirectory:wifi_Download_cfg.yaml: configuration file for image burning. The partitions can be adjusted as required./data/data: The first /datais the root directory to mount. The seconddatais thedatadirectory in the root directory. You can place the configuration file in the seconddatadirectory or in any directory at the same level. During packaging, the whole root directory is packaged.
Set the following items in the
config.jsonfile based on thewifi_Download_cfg.yamlfile:fs_src: name under which the file system is mounted.fs_name: name of the generated file system.block_size: size of the read data block. Set it to4Kalignment and do not change the value.fs_size: size of the generated file system.burn_name: size of the burntbinname.enable: whether to generate the file system.
In the
//device/soc/bestechnic/bes2600/liteos_m/components/hdf_config/hdf.hcsfile, configure the start address for burning the file system, size of the file system, and size of the read data block (block_size). The reference configuration is as follows:
misc {
fs_config {
example_config {
match_attr = "littlefs_config";
mount_points = ["/data"];
partitions = [10];
block_size = [4096];
block_count = [1024];
}
}
storage_config {
flash_config {
match_attr = "flash_config";
partitions = [10];
owner = [0];
description = ["littlefs"];
start_addr = [0xB60000];
length = [0x400000];
options = [3];
}
}
}
In device/soc/bestechnic/bes2600/liteos_m/components/fs/fs_init.c, load data through hdf and read and write to flash as follows:
static int32_t FsDriverInit(struct HdfDeviceObject *object)
{
if (object == NULL) {
return HDF_FAILURE;
}
if (object->property) {
if (FsGetResource(fs, object->property) != HDF_SUCCESS) {
HDF_LOGE("%s: FsGetResource failed", __func__);
return HDF_FAILURE;
}
}
for (int i = 0; i < sizeof(fs) / sizeof(fs[0]); i++) {
if (fs[i].mount_point == NULL)
continue;
fs[i].lfs_cfg.read = littlefs_block_read;
fs[i].lfs_cfg.prog = littlefs_block_write;
fs[i].lfs_cfg.erase = littlefs_block_erase;
fs[i].lfs_cfg.sync = littlefs_block_sync;
fs[i].lfs_cfg.read_size = 256;
fs[i].lfs_cfg.prog_size = 256;
fs[i].lfs_cfg.cache_size = 256;
fs[i].lfs_cfg.lookahead_size = 16;
fs[i].lfs_cfg.block_cycles = 1000;
int ret = mount(NULL, fs[i].mount_point, "littlefs", 0, &fs[i].lfs_cfg);
HDF_LOGI("%s: mount fs on '%s' %s\n", __func__, fs[i].mount_point, (ret == 0) ? "succeed" : "failed");
}
return HDF_SUCCESS;
}
C Library Adaptation
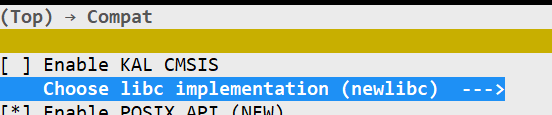
In the mini system, adapting the C library is a complex process. For details, see Solution to Smooth Switchover Between musl and newlib for LiteOS-M Kernel. The toolchain uses the newlib C library of the gcc-arm-none-eabi-10.3-2021.10-x86_64-linux.tar.bz2. In light of this, the newlib C library is used for system porting. Select newlib in make menuconfig of the kernel, as shown below.
malloc Adaptation
For details, see The Red Hat newlib C Library-malloc. You can use either of the following methods to implement malloc adaptation:
Implement the
_sbrk_rfunction. In this method, the memory allocation function innewlibis used.Implement
_malloc_r,_realloc_r,_reallocf_r,_free_r,_memalign_r, and_malloc_usable_size_r. In this method, the memory allocation function in the kernel can be used.
To facilitate memory allocation algorithm optimization and fault locating based on services, the latter method is used in this example.
First, as the symbols of the functions in the second method already exist in newlib, you need to use the wrap link option of gcc to replace these function symbols with the kernel implementation code in //kernel/liteos_m/kal/libc/newlib/porting/src/malloc.c.
Then, add the wrap link option of these functions to //device/board/fnlink/v200zr/liteos_m/config.gni.
board_ld_flags += [
"-Wl,--wrap=_malloc_r",
"-Wl,--wrap=_realloc_r",
"-Wl,--wrap=_reallocf_r",
"-Wl,--wrap=_free_r",
"-Wl,--wrap=_memalign_r",
"-Wl,--wrap=_malloc_usable_size_r",
]
vsprintf and Related Adaptation
Implement vprintf, vfprintf, printf, snprintf, and sprintf. For details, see vfprintf.
Similar to malloc adaptation, the implementation of these functions must be provided first, that is, //device/soc/bestechnic/bes2600/liteos_m/components/utils/src/printf.c. In this example, the friendly implementation of the open-source protocol is used. Different from malloc adaptation, this function is provided by the SoC vendor. This is because the implementation size varies in terms of printing based on the project requirements, and therefore the kernel cannot provide a unified implementation.
Then, add the wrap link option of these functions to //device/board/fnlink/v200zr/liteos_m/config.gni.
board_ld_flags += [
"-Wl,--wrap=printf",
"-Wl,--wrap=sprintf",
"-Wl,--wrap=snprintf",
"-Wl,--wrap=vsnprintf",
"-Wl,--wrap=vprintf",
]
open and Related Adaptation
The adaptation is implemented by the kernel and does not need attention from the SoC. The kernel file //kernel/liteos_m/kal/libc/newlib/porting/src/fs.c has been adapted to the _read, _write, and other related functions of newlib, as shown below.
...
ssize_t _read(int fd, void *buf, size_t nbyte)
{
return LOS_Read(fd, buf, nbyte);
}
ssize_t _write(int fd, const void *buf, size_t nbyte)
{
return LOS_Write(fd, buf, nbyte);
}
off_t _lseek(int fd, off_t offset, int whence)
{
return LOS_Lseek(fd, offset, whence);
}
...
Board-Level OS Porting
Driver Porting
Porting the HDF Driver for the SoC Platform
Driver adaptation files are stored in drivers/adapter/platform, including gpio, i2c, pwm, spi, uart, and watchdog, which are loaded using the HDF mechanism. This section uses gpio as an example.
GPIO Driver Adaptation
The gpio driver adaptation requires building adaptation and source code adaptation.
The //drivers/adapter/platform/gpio/BUILD.gn file describes the building adaptation of the gpio driver, as shown below:
module_switch = defined(LOSCFG_DRIVERS_HDF_PLATFORM_GPIO) --- If the GPIO configuration switch of the HDF is enabled, the following is built:
module_name = get_path_info(rebase_path("."), "name")
hdf_driver(module_name) {
sources = []
if (defined(LOSCFG_SOC_COMPANY_BESTECHNIC)) { --- If the Bestechnic SoC configuration switch is enabled, the Bestechnic GPIO driver is built.
sources += [ "gpio_bes.c" ]
}
include_dirs = [ "." ]
}
The //drivers/adapter/platform/gpio/gpio_bes.c file describes the source code adaptation of the Bestechnic GPIO driver.
First, load the basic driver adaptation framework based on OpenHarmony HDF, as shown below:
struct HdfDriverEntry g_GpioDriverEntry = {
.moduleVersion = 1,
.moduleName = "BES_GPIO_MODULE_HDF",
.Bind = GpioDriverBind,
.Init = GpioDriverInit,
.Release = GpioDriverRelease,
};
HDF_INIT(g_GpioDriverEntry); --- Load the GPIO driver through HDF_INIT.
Then, obtain the hcs parameter for initialization as follows:
static int32_t GpioDriverInit(struct HdfDeviceObject *device)
{
int32_t ret;
struct GpioCntlr *gpioCntlr = NULL;
if (device == NULL) {
HDF_LOGE("%s: device is NULL", __func__);
return HDF_ERR_INVALID_PARAM;
}
gpioCntlr = GpioCntlrFromDevice(device); --- Obtain the GPIO configuration.
if (gpioCntlr == NULL) {
...
Porting the HDF Drivers of Peripheral Components on the Board
Peripheral components are connected to the board through the SoC bus. In this example, the peripheral component is a display, whose driver adaptation code is stored in the //device/board/fnlink/drivers/liteos_m directory.
Display Driver Adaptation
The display driver adaptation process is similar to the SoC driver adaptation process. In the //device/board/fnlink/drivers/liteos_m/display/BUILD.gn file, load the driver module based on the hdf_driver template, as shown below:
module_name = get_path_info(rebase_path("."), "name")
hdf_driver(module_name) {
sources = [
"zzw395.c",
]
include_dirs = [
"//drivers/peripheral/display/interfaces/include",
...
]
}
In the //device/board/fnlink/drivers/liteos_m/display/zzw395.c file, load the display driver based on HDF, as shown below:
static struct HdfDriverEntry g_ZZW395DriverEntry = {
.moduleVersion = 1,
.moduleName = "HDF_PANEL_ZZW395",
.Bind = PanelDriverBind,
.Init = PanelDriverInit,
.Release = PanelDriverRelease,
};
HDF_INIT(g_ZZW395DriverEntry);
Configure the driver parameters based on hcs, which are loaded during PanelDriverInit initialization. The sample code is as follows:
static int32_t PanelDriverInit(struct HdfDeviceObject *object)
{
if (object == NULL) {
return HDF_FAILURE;
}
HDF_LOGD("%s entry !!!", __func__);
if (object->property) {
if (PanelGetResource(&priv, object->property) != HDF_SUCCESS) {
HDF_LOGE("%s: PanelGetResource failed", __func__);
return HDF_FAILURE;
}
}
...
Adapting OpenHarmony Subsystems
The adaptation of OpenHarmony subsystems consists of two parts:
- Add the target subsystem and component to the
config.jsonfile so that the component can be included in the compilation by the compilation system. - Perform hardware adaptation or optional software adaptation for the
HALlayer APIs of the component.
Communication Subsystem Adaptation
wifi_lite Component Adaptation
Add the wifi_lite component of the communication subsystem to the config.json file.
{
"subsystem": "communication",
"components": [
{
"component": "wifi_lite",
"optional": "true"
}
]
},
The wifi_lite component is described in the //build/lite/components/communication.json file as follows:
{
"component": "wifi_lite",
...
"targets": [
"//foundation/communication/wifi_lite:wifi" --- wifi_lite in the compilation targets
],
...
},
In the //foundation/communication/wifi_lite/BUILD.gn file, describe the path of the API header file to be adapted as follows:
config("include") {
include_dirs = [ "interfaces/wifiservice" ] --- The wifi_lite component provides the header file but not the implementation. Therefore, it exposes the adaptation directory to the hardware vendor for adaptation. The vendor provides the Wi-Fi protocol stack source code for implementation.
}
group("wifi") {
public_configs = [ ":include" ]
}
In this example, Wi-Fi is provided by SoC. Therefore, the Wi-Fi adaptation source code is stored in the //device/soc/bestechnic/hals/communication/wifi_lite/wifiservice directory of SoC, which contains wifi_device.c and wifi_hotspot.c to adapt to wifi_device.h and wifi_hotspot.h, respectively. The sample code is as follows:
...
WifiErrorCode Scan(void) --- Wi-Fi hotspot scanning function in wifi_device.c, which is used to adapt to the Scan function in wifi_device.h.
{
WifiErrorCode ret = ERROR_WIFI_BUSY;
if (IsWifiActive() != WIFI_STA_ACTIVE)
return ERROR_WIFI_IFACE_INVALID;
if (g_HalHmosWifiInfo.scan_state == SCAN_REQUEST||
g_HalHmosWifiInfo.scan_state == SCAN_TRIGGER)
return ERROR_WIFI_BUSY;
HalHmosWifiLock();
ret = ((HalHmosSendEvent(HMOS_ON_WIFI_SCAN_STATE_CHANGED, NULL) == 0) ? WIFI_SUCCESS : ERROR_WIFI_BUSY);
HalHmosWifiUnLock();
return ret;
}
...
int GetSignalLevel(int rssi, int band) --- Function in wifi_hotspot.c for obtaining Wi-Fi hotspot parameters, which is used to adapt to the GetSignalLevel function in wifi_hotspot.h.
{
if (band == HOTSPOT_BAND_TYPE_2G) {
if (rssi >= RSSI_LEVEL_4_2_G)
return RSSI_LEVEL_4;
if (rssi >= RSSI_LEVEL_3_2_G)
return RSSI_LEVEL_3;
if (rssi >= RSSI_LEVEL_2_2_G)
return RSSI_LEVEL_2;
if (rssi >= RSSI_LEVEL_1_2_G)
return RSSI_LEVEL_1;
}
if (band == HOTSPOT_BAND_TYPE_5G) {
if (rssi >= RSSI_LEVEL_4_5_G)
return RSSI_LEVEL_4;
if (rssi >= RSSI_LEVEL_3_5_G)
return RSSI_LEVEL_3;
if (rssi >= RSSI_LEVEL_2_5_G)
return RSSI_LEVEL_2;
if (rssi >= RSSI_LEVEL_1_5_G)
return RSSI_LEVEL_1;
}
return ERROR_WIFI_INVALID_ARGS;
}
lwIP Component Adaptation
By default, lwip is configured in the LiteOS-M kernel directory. Therefore, you can include the lwip directory in the kernel component for compilation. The sample code is as follows:
{
"subsystem": "kernel",
"components": [
{
"component": "liteos_m",
"features": [
"ohos_kernel_liteos_m_lwip_path = \"//device/soc/bestechnic/bes2600/liteos_m/components/net/lwip-2.1\"" --- Specify the SoC vendor directory for compilation.
]
}
]
},
The //device/soc/bestechnic/bes2600/liteos_m/components/net/lwip-2.1/BUILD.gn file describes the compilation of lwip as follows:
import("//kernel/liteos_m/liteos.gni")
import("$LITEOSTHIRDPARTY/lwip/lwip.gni")
import("$LITEOSTOPDIR/components/net/lwip-2.1/lwip_porting.gni")
module_switch = defined(LOSCFG_NET_LWIP_SACK)
module_name = "lwip"
kernel_module(module_name) {
sources = LWIP_PORTING_FILES + LWIPNOAPPSFILES -
[ "$LWIPDIR/api/sockets.c" ] + [ "porting/src/ethernetif.c" ] --- Add the ethernetif.c file to adapt to the initialization of the Ethernet adapter.
defines = [ "LITEOS_LWIP=1" ]
defines += [ "CHECKSUM_BY_HARDWARE=1" ]
}
config("public") {
defines = [ "_BSD_SOURCE=1" ]
include_dirs =
[ "porting/include" ] + LWIP_PORTING_INCLUDE_DIRS + LWIP_INCLUDE_DIRS
}
In the //device/soc/bestechnic/bes2600/liteos_m/components/net/lwip-2.1/porting/include/lwip/lwipopts.h file, retain the original lwip configuration, on which the software bus depends, and add the following hardware adaptation options:
#ifndef _PORTING_LWIPOPTS_H_
#define _PORTING_LWIPOPTS_H_
#include_next "lwip/lwipopts.h" --- Retain the original configuration.
#define LWIP_NETIF_STATUS_CALLBACK 1
#define LWIP_CHECKSUM_ON_COPY 0
#define CHECKSUM_GEN_UDP 0 --- Add hardware adaptation options.
#endif /* _PORTING_LWIPOPTS_H_ */
In the //device/soc/bestechnic/bes2600/liteos_m/components/net/lwip-2.1/porting/src/ethernetif.c file, add the adaptation to the initialization of the Ethernet adapter as follows:
err_t
ethernetif_init(struct netif *netif)
{
...
#ifdef CHECKSUM_BY_HARDWARE
eth_hw_checksum_init();
#endif
...
netif->linkoutput = low_level_output;
netif->drv_send = liteos_low_level_output;
netif->hwaddr_len = NETIF_MAX_HWADDR_LEN;
low_level_init(netif);
driverif_init(netif);
return ERR_OK;
...
}
dsoftbus Component Adaptation
Add the dsoftbus component to the config.json file as follows:
{
"component": "dsoftbus",
"features": [
"softbus_adapter_config = \"//vendor/bestechnic/mini_distributed_music_player/dsoftbus_lite_config\""
]
},
The dsoftbus component provides the softbus_adapter_config configuration option in the //foundation/communication/dsoftbus/dsoftbus.gni file for configuration during porting. The configuration specifies the path for DSoftBus porting adaptation.
In this example, softbus_adapter_config is set to //vendor/bestechnic/mini_distributed_music_player/dsoftbus_lite_config. The structure of this path is as follows:
.
├── feature_config --- DSoftBus configuration, for example, whether to enable self-discovery.
│ └── mini
│ └── config.gni
└── spec_config --- DSoftBus configuration, for example, the DSoftBus log level.
├── softbus_config_adapter.c
├── softbus_config_adapter.h
└── softbus_config_type.h
The following configuration items are defined in the config.gni file:
| Item | Description |
|---|---|
| dsoftbus_feature_disc_ble | Whether to enable BLE discovery. |
| dsoftbus_feature_disc_coap | Whether to enable CoAP discovery. |
| dsoftbus_feature_conn_tcp | Whether to enable TCP connection. |
| dsoftbus_feature_conn_br | Whether to enable BR connection. |
| dsoftbus_feature_conn_ble | Whether to enable BLE connection. |
| dsoftbus_feature_conn_p2p | Whether to enable P2P connection. |
| dsoftbus_feature_trans_udp | Whether to enable UDP transmission. |
| dsoftbus_feature_trans_udp_stream | Whether to enable the UDP transport stream. |
| dsoftbus_feature_trans_udp_file | Whether to enable UDP file transfer. |
| dsoftbus_feature_ip_auth | Whether to enable transmission channel authentication. |
| dsoftbus_feature_auth_account | Whether to enable account-based authentication. |
| dsoftbus_feature_qos | Whether to enable QoS. |
The following configuration items are defined in the softbus_config_adapter.c file:
| Item | Description |
|---|---|
| SOFTBUS_INT_MAX_BYTES_LENGTH | SendBytes: maximum number of bytes that can be sent. |
| SOFTBUS_INT_MAX_MESSAGE_LENGTH | SendMessage: maximum length of a message that can be sent. |
| SOFTBUS_INT_CONN_BR_MAX_DATA_LENGTH | Maximum volume of data received over Bluetooth. |
| SOFTBUS_INT_CONN_RFCOM_SEND_MAX_LEN | Maximum volume of data sent over Bluetooth. |
| SOFTBUS_INT_ADAPTER_LOG_LEVEL | Log level. |
| SOFTBUS_STR_STORAGE_DIRECTORY | Storage directory. |
After DSoftBus is configured, it is not started by default. Therefore, you need to invoke the InitSoftBusServer function through the startup framework as follows:
static void DSoftBus(void)
{
osThreadAttr_t attr;
attr.name = "dsoftbus task";
attr.attr_bits = 0U;
attr.cb_mem = NULL;
attr.cb_size = 0U;
attr.stack_mem = NULL;
attr.stack_size = 65536;
attr.priority = 24;
extern void InitSoftBusServer(void);
if (osThreadNew((osThreadFunc_t) InitSoftBusServer, NULL, &attr) == NULL) {
printf("Failed to create WifiSTATask!\n");
}
}
APP_FEATURE_INIT(DSoftBus);
RPC Component Adaptation
Add the following rpc configuration to the config.json file:
{
"component": "rpc"
},
Similarly, for the rpc component, you need to invoke the StartDBinderService function through the startup framework. The running of this function depends on the IP address obtained by the host. Therefore, invoke this function in the callback of the IP address change event registered by the lwIP protocol stack as follows:
static void RpcServerWifiDHCPSucCB(struct netif *netif, netif_nsc_reason_t reason,
const netif_ext_callback_args_t *args)
{
(void) args;
if (netif == NULL) {
printf("%s %d, error: input netif is NULL!\n", __FUNCTION__, __LINE__);
return;
}
if (reason == LWIP_NSC_IPSTATUS_CHANGE) {
if (netif_is_up(netif) && !ip_addr_isany(&netif->ip_addr)) {
printf("%s %d, start rpc server!\n", __FUNCTION__, __LINE__);
StartDBinderService();
}
}
}
static void WifiDHCPRpcServerCB(void)
{
NETIF_DECLARE_EXT_CALLBACK(WifiReadyRpcServerCallback);
netif_add_ext_callback(&WifiReadyRpcServerCallback, RpcServerWifiDHCPSucCB);
}
APP_FEATURE_INIT(WifiDHCPRpcServerCB);
Startup Subsystem Adaptation
For the startup subsystem, adapt the bootstrap_lite and syspara_lite components. Add the corresponding configuration items to the vendor/bestechnic_bak/display_demo/config.json file, as shown below:
{
"subsystem": "startup",
"components": [
{
"component": "bootstrap_lite" --- bootstrap_lite component
},
{
"component": "syspara_lite", --- syspara_lite component
"features": [
"enable_ohos_startup_syspara_lite_use_posix_file_api = true"
]
}
]
},
When adapting the bootstrap_lite component, you need to add the following code snippet to the //device/soc/bestechnic/bes2600/liteos_m/sdk/bsp/out/best2600w_liteos/_best2001.lds file:
__zinitcall_bsp_start = .;
KEEP (*(.zinitcall.bsp0.init))
KEEP (*(.zinitcall.bsp1.init))
KEEP (*(.zinitcall.bsp2.init))
KEEP (*(.zinitcall.bsp3.init))
KEEP (*(.zinitcall.bsp4.init))
__zinitcall_bsp_end = .;
__zinitcall_device_start = .;
KEEP (*(.zinitcall.device0.init))
KEEP (*(.zinitcall.device1.init))
KEEP (*(.zinitcall.device2.init))
KEEP (*(.zinitcall.device3.init))
KEEP (*(.zinitcall.device4.init))
__zinitcall_device_end = .;
__zinitcall_core_start = .;
KEEP (*(.zinitcall.core0.init))
KEEP (*(.zinitcall.core1.init))
KEEP (*(.zinitcall.core2.init))
KEEP (*(.zinitcall.core3.init))
KEEP (*(.zinitcall.core4.init))
__zinitcall_core_end = .;
__zinitcall_sys_service_start = .;
KEEP (*(.zinitcall.sys.service0.init))
KEEP (*(.zinitcall.sys.service1.init))
KEEP (*(.zinitcall.sys.service2.init))
KEEP (*(.zinitcall.sys.service3.init))
KEEP (*(.zinitcall.sys.service4.init))
__zinitcall_sys_service_end = .;
__zinitcall_sys_feature_start = .;
KEEP (*(.zinitcall.sys.feature0.init))
KEEP (*(.zinitcall.sys.feature1.init))
KEEP (*(.zinitcall.sys.feature2.init))
KEEP (*(.zinitcall.sys.feature3.init))
KEEP (*(.zinitcall.sys.feature4.init))
__zinitcall_sys_feature_end = .;
__zinitcall_run_start = .;
KEEP (*(.zinitcall.run0.init))
KEEP (*(.zinitcall.run1.init))
KEEP (*(.zinitcall.run2.init))
KEEP (*(.zinitcall.run3.init))
KEEP (*(.zinitcall.run4.init))
__zinitcall_run_end = .;
__zinitcall_app_service_start = .;
KEEP (*(.zinitcall.app.service0.init))
KEEP (*(.zinitcall.app.service1.init))
KEEP (*(.zinitcall.app.service2.init))
KEEP (*(.zinitcall.app.service3.init))
KEEP (*(.zinitcall.app.service4.init))
__zinitcall_app_service_end = .;
__zinitcall_app_feature_start = .;
KEEP (*(.zinitcall.app.feature0.init))
KEEP (*(.zinitcall.app.feature1.init))
KEEP (*(.zinitcall.app.feature2.init))
KEEP (*(.zinitcall.app.feature3.init))
KEEP (*(.zinitcall.app.feature4.init))
__zinitcall_app_feature_end = .;
__zinitcall_test_start = .;
KEEP (*(.zinitcall.test0.init))
KEEP (*(.zinitcall.test1.init))
KEEP (*(.zinitcall.test2.init))
KEEP (*(.zinitcall.test3.init))
KEEP (*(.zinitcall.test4.init))
__zinitcall_test_end = .;
__zinitcall_exit_start = .;
KEEP (*(.zinitcall.exit0.init))
KEEP (*(.zinitcall.exit1.init))
KEEP (*(.zinitcall.exit2.init))
KEEP (*(.zinitcall.exit3.init))
KEEP (*(.zinitcall.exit4.init))
__zinitcall_exit_end = .;
The added code snippet is for storing the external APIs provided by bootstrap_init, which are injected. For details about the APIs, see //utils/native/lite/include/ohos_init.h. The following table lists the main macros for automatic service initialization.
| API | Description |
|---|---|
| SYS_SERVICE_INIT(func) | Entry for initializing and starting a core system service. |
| SYS_FEATURE_INIT(func) | Entry for initializing and starting a core system feature. |
| APP_SERVICE_INIT(func) | Entry for initializing and starting an application-layer service. |
| APP_FEATURE_INIT(func) | Entry for initializing and starting an application-layer feature. |
 NOTE
NOTE
You need to add a forcible link to thelib file generated by building the previous loaded components.
If the bootstrap_lite component is configured in the vendor/bestechnic/display_demo/config.json file, as shown below:
{
"subsystem": "startup",
"components": [
{
"component": "bootstrap_lite"
},
...
]
},
The bootstrap_lite component will compile the //base/startup/bootstrap_lite/services/source/bootstrap_service.c file. In this file, inject the Init function symbol to __zinitcall_sys_service_start and __zinitcall_sys_service_end through SYS_SERVICE_INIT. Because the Init function is not explicitly called, it needs to be forcibly linked to the final image. The sample code is as follows:
static void Init(void)
{
static Bootstrap bootstrap;
bootstrap.GetName = GetName;
bootstrap.Initialize = Initialize;
bootstrap.MessageHandle = MessageHandle;
bootstrap.GetTaskConfig = GetTaskConfig;
bootstrap.flag = FALSE;
SAMGR_GetInstance()->RegisterService((Service *)&bootstrap);
}
SYS_SERVICE_INIT(Init); --- Once SYS (SYS_INIT) is started, the generated library needs to be forcibly linked.
In the //base/startup/bootstrap_lite/services/source/BUILD.gn file, the save path of libbootstrap.a is set to out/v200zr/display_demo/libs as follows:
static_library("bootstrap") {
sources = [
"bootstrap_service.c",
"system_init.c",
]
....
In this case, you need to add bootstrap under force_link_libs in vendor/bestechnic/display_demo/config.json, as shown below:
"bin_list": [
{
"elf_name": "wifiiot",
"bsp_target_name": "best2600w_liteos",
"signature": "false",
"burn_name": "rtos_main",
"enable": "true",
"force_link_libs": [
"bootstrap", --- Forcibly link to libbootstrap.a.
...
]
},
When the syspara_lite component is adapted, system parameters are written to a file for persistent storage. In the mini system, file operation APIs include POSIX and HalFiles.
For access to the file system in the kernel, use the POSIX API, which means you need to add enable_ohos_startup_syspara_lite_use_posix_file_api = true to the features field.
If you are using the HalFiles API, no modification is required.
During adaptation of the GetSerial API, no Serial Number is written to the development board, which is different from the case in the production line. Therefore, you need to assign an attribute to uniquely identify the development board. In this example, the Wi-Fi MAC address is used.
#define ETH_ALEN 6
#define MAC_BITS 4
#define MAC_HIGH_MASK 0xf0
#define MAC_LOW_MASK 0x0f
#define HEX_A 0xa
#define CHAR_NUM_OFFSET 0x30
#define CHAR_CAPITAL_OFFSET 0x37
#define STR_END_FLAG '\0'
typedef unsigned char u8;
static char serialNumber[2*ETH_ALEN + 1]; --- The last character is used as the end character '\0'.
static char Hex2Char(u8 hex)
{
if (hex < HEX_A) {
return hex + CHAR_NUM_OFFSET; --- Convert the value 0 to char '0'.
} else {
return hex + CHAR_CAPITAL_OFFSET; --- Convert the value 0xa to char 'A'.
}
}
const char* HalGetSerial(void)
{
char macAddr[ETH_ALEN];
// as devboard has no production serial number, we just
// use wifi mac address as device serial number.
if (serialNumber[0] == STR_END_FLAG) { --- The MAC address is obtained only when the API is invoked for the first time.
extern int bwifi_get_own_mac(u8 *addr);
bwifi_get_own_mac(macAddr); --- Obtain the MAC address.
int j = 0;
for (int i = 0; i < ETH_ALEN; i++) {
u8 lowFour, highFour;
highFour = (macAddr[i] & MAC_HIGH_MASK) >> MAC_BITS;
serialNumber[j] = Hex2Char(highFour);
j++;
lowFour = macAddr[i] & MAC_LOW_MASK;
serialNumber[j] = Hex2Char(lowFour);
j++;
} --- Convert the MAC address to the serial number.
}
return serialNumber;
}
DFX Subsystem Adaptation
To adapt the DFX subsystem, you need to add the hilog_lite component in the config.json file.
{
"subsystem": "hiviewdfx",
"components": [
{
"component": "hilog_lite",
"optional": "true"
}
]
},
Register the log output implementation function in //device/soc/bestechnic/bes2600/liteos_m/components/utils/src/hm_sys.c.
boolean HilogProc_Impl(const HiLogContent *hilogContent, uint32 len)
{
char tempOutStr[LOG_FMT_MAX_LEN] = {0};
if (LogContentFmt(tempOutStr, sizeof(tempOutStr), hilogContent) > 0) {
printf(tempOutStr);
}
return TRUE;
}
HiviewRegisterHilogProc(HilogProc_Impl);
systemabilitymgr Subsystem Adaptation
To adapt the systemabilitymgr subsystem, you need to add the samgr_lite component in the config.json file, as shown below:
{
"subsystem": "systemabilitymgr",
"components": [
{
"component": "samgr_lite",
"features": [
"config_ohos_systemabilitymgr_samgr_lite_shared_task_size = 4096"
]
}
]
},
In the mini system, the default size of the shared task stack for samgr_lite is 0x800. To avoid stack overflow, adjust the size to 0x1000.
Security Subsystem Adaptation
To adapt the security subsystem, you need to add the huks/deviceauth_lite component in the config.json file, as shown below:
{
"subsystem": "security",
"components": [
{
"component": "huks",
"features": [
"huks_use_lite_storage = true",
"huks_use_hardware_root_key = true",
"huks_config_file = \"hks_config_lite.h\"",
"huks_key_store_path = \"/data/\"",
"ohos_security_huks_mbedtls_porting_path = \"//device/soc/bestechnic/hals/mbedtls\""
]
},
{
"component": "deviceauth_lite",
"features": [
"deviceauth_storage_path = \"/data/\"",
"deviceauth_hichain_thread_stack_size = 9472"
]
}
]
}
During huks component adaptation, set huks_key_store_path to the path for storing the key and ohos_security_huks_mbedtls_porting_path to the directory for mbedtls adaptation, so that the chip can adapt mbedtls to hardware random numbers.
During deviceauth_lite component adaptation, set deviceauth_storage_path to the path for storing device authentication information and deviceauth_hichain_thread_stack_size to the thread stack size.
Multimedia Subsystem Adaptation
To adapt the multimedia subsystem, you need to add the histreamer component in the config.json file, as shown below:
{
"subsystem": "multimedia",
"components": [
{
"component": "histreamer",
"features": [
"histreamer_enable_plugin_hdi_adapter = true",
"histreamer_enable_plugin_minimp3_adapter = true",
"histreamer_enable_plugin_ffmpeg_adapter = false",
"config_ohos_histreamer_stack_size = 65536"
]
}
]
},
The configuration items of the histreamer component are described as follows:
| Item | Description |
|---|---|
| histreamer_enable_plugin_hdi_adapter | Whether to enable histreamer to connect to the HDMI interface. |
| histreamer_enable_plugin_minimp3_adapter | Whether to enable the plug-in to adapt to miniMP3. |
| histreamer_enable_plugin_ffmpeg_adapter | Whether to enable the plug-in to adapt to FFmpeg. |
| config_ohos_histreamer_stack_size | Size of the histreamer stack. |
utils Subsystem Adaptation
To adapt the utils subsystem, you need to add the kv_store, js_builtin, timer_task, and kal_timer components in the config.json file, as shown below:
{
"subsystem": "utils",
"components": [
{
"component": "kv_store",
"features": [
"enable_ohos_utils_native_lite_kv_store_use_posix_kv_api = true"
]
},
{
"component": "js_builtin"
},
{
"component": "timer_task"
},
{
"component": "kal_timer",
}
]
},
Similar to that in the syspara_lite component, the key-value pair is written to a file during adaptation of the kv_store component. In the mini system, file operation APIs include POSIX and HalFiles. For access to the file system in the kernel, use the POSIX API, which means that you need to add enable_ohos_utils_native_lite_kv_store_use_posix_kv_api = true to the features field. If you are using the HalFiles API, no modification is required.
Graphics Subsystem Adaptation
To adapt the graphic subsystem, you need to add the graphic_utils component in the config.json file, as shown below:
"components": [
{
"component": "graphic_utils",
"features": [
"enable_ohos_graphic_utils_product_config = true"
]
},
{
"component": "ui"
}
]
}
For details about graphic configuration, see //vendor/bestechnic/display_demo/graphic_config/product_graphic_lite_config.h.
For details about graphic adaptation, see //device/soc/bestechnic/bes2600/liteos_m/components/ui, . The main functions are as follows:
display_device: instantiatesBaseGfxEngine.touch_input: instantiatesPointerInputDevice.UiMainTask: initializes the font engine and executes rendering tasks.
Layers of the graphic subsystem:
aafwk_lite + appexecfwk_lite (AAFWK + APPEXECFWK)
|
ace_engine_lite + jerryscript + i18n_lite + resmgr_lite + utils/native/lite/... (ACE and JS engines and their dependencies)
|
arkui_lite + graphic_graphic_utils_lite (Graphic framework)
|
giflib + libjpeg + libpng + qrcodegen + freetype... (Third-party graphics library)
For details about the graphic application demo, see the //vendor/bestechnic/display_demo/tests/app.cpp file, as shown below:
/* ui app entry */
void RunApp()
{
#ifdef UI_TEST
AnimatorDemoStart(); --- native ui demo
#elif defined(ABILITY_TEST)
StartJSApp(); --- js demo
#endif
}
void AppEntry(void)
{
UiMain();
}
APP_FEATURE_INIT(AppEntry);
ACE Subsystem Adaptation
To adapt the ACE subsystem, you need to add the ace_engine_lite component in the config.json file, as shown below:
{
"subsystem": "ace",
"components": [
{
"component": "ace_engine_lite",
"features": [
"enable_ohos_ace_engine_lite_product_config = true"
]
}
]
},
For details about the ace_engine_lite configuration, see //vendor/bestechnic/display_demo/ace_lite_config/product_acelite_config.h.
The ace_lite application is developed in JavaScript. The detailed procedure is as follows:
- Use DevEco Studio to compile a JavaScript application. For details, see Lite Wearable Development Specifications.
- Use the Previewer feature to preview the application and obtain the JS package
entry\.preview\intermediates\res\debug\lite\assets\js\default. - Place the JS package to the corresponding file system path
vendor/bestechnic/display_demo/fs/data/data/js, as shown below:
├── app.js
├── common
├── i18n
├── manifest.json
└── pages
- Start building to generate the system image. Burn the system image the development board, and the system will load and start the
aceapplication fromapp.js.
aafwk Subsystem Adaptation
To adapt the aafwk subsystem, you need to add the aafwk_lite component in the config.json file, as shown below:
{
"subsystem": "aafwk",
"components": [
{
"component": "aafwk_lite",
"features": [
"ability_lite_enable_ohos_appexecfwk_feature_ability = true", --- Enable the FA to support the graphics capability.
"ability_lite_config_ohos_aafwk_ams_task_size = 4096" --- Configure the size of the aafwk stack.
]
}
]
},
For details about the aafwk_lite use cases, see the vendor/bestechnic/display_demo/tests/ability directory, which includes the launcher and js app applications. The function invocation process of the applications is described as follows:
launcherapplication: UseInstallLauncherto install thenative uiapplication, whoseBundleNameis"com.example.launcher". AfterAbilityMgrSliteFeatureis started,AbilityMgrHandler::StartLauncher()is invoked to start thelauncherapplication.StartJSAppapplication: UseStartAbilityto start anyWantand passwant datatoJS_APP_PATH,SetWantData(&want, JS_APP_PATH, strlen(JS_APP_PATH) + 1).
appexecfwk Subsystem Adaptation
To adapt the appexecfwk subsystem, you need to add the appexecfwk_lite component in the config.json file, as shown below:
{
"subsystem": "appexecfwk",
"components": [
{
"component": "appexecfwk_lite"
}
]
},
Compatibility Test
Product Compatibility Specifications
For details about product compatibility specifications, see Introduction to Product Compatibility SIG.
XTS Test Cases
For details about the XTS test cases, see XTS. To adapt the XTS subsystem, you need to add the xts_acts/xts_tools component in the config.json file, as shown below:
{
"subsystem": "xts",
"components": [
{ "component": "xts_acts", "features":
[
"config_ohos_xts_acts_utils_lite_kv_store_data_path = \"/data\"",
"enable_ohos_test_xts_acts_use_thirdparty_lwip = true"
]
},
{ "component": "xts_tools", "features":[] }
]
}
Where:
config_ohos_xts_acts_utils_lite_kv_store_data_pathis the name of the root directory to which the file system is mounted.enable_ohos_test_xts_acts_use_thirdparty_lwipindicates whether to use the source code in thethirdparty/lwipdirectory. The valuetruemeans to use the source code in thethirdparty/lwipdirectory, andfalsemeans the opposite.
After the execution is complete, xx Tests xx Failures xx Ignored is displayed, as shown below:
...
[16:53:43:438]../../../test/xts/acts/utils_lite/kv_store_hal/src/kvstore_func_test.c:793:testKvStoreMaxSize004:PASS
[16:53:43:438]+-------------------------------------------+
[16:53:43:438]
[16:53:43:438]-----------------------
[16:53:43:438]32 Tests 0 Failures 0 Ignored
[16:53:43:438]OK
[16:53:43:439]All the test suites finished!
Report Submission
Save the preceding XTS test result as a test report and upload it to the OpenHarmony compatibility test website. This is a prerequisite for synchronizing the code from the sig repository to the master repository. The procedure is as follows:
Step 1: Compress the XTS test report into a zip file.
Step 2: Generate the SHA checksum of the test report. In this example, the SHA checksum is generated by uploading the zip file to the SHA checksum online generator.
Step 3: Go to the OpenHarmony compatibility test website and upload the report.
- Set
API Levelto the"sdkApiLevel"value in the report. - Set
OSto the"OS Version"value in the report.
Coming Soon
The following aspects will be added in the future:
- Bluetooth
bmspackage installation- Verifying
bytecodefor runningJS - Distributed capabilities:
dmsanddm - Example of a distributed music player
你可能感兴趣的鸿蒙文章
harmony 鸿蒙Combo Solution – ASR Chip Porting Case
harmony 鸿蒙IoT Solution - Chipsea CST85 Chip Porting Case
harmony 鸿蒙Standard System Solution – Rockchip RK3568 Porting Case
harmony 鸿蒙A Method for Rapidly Porting the OpenHarmony Linux Kernel
- 所属分类: 后端技术
- 本文标签: