harmony 鸿蒙任务管理
任务管理
基本概念
从系统角度看,任务是竞争系统资源的最小运行单元。任务可以使用或等待CPU、使用内存空间等系统资源,各任务的运行相互独立。
OpenHarmony LiteOS-M的任务模块可以给用户提供多个任务,实现任务间的切换,帮助用户管理业务程序流程。任务模块具有如下特性:
支持多任务。
一个任务表示一个线程。
抢占式调度机制,高优先级的任务可打断低优先级任务,低优先级任务必须在高优先级任务阻塞或结束后才能得到调度。
相同优先级任务支持时间片轮转调度方式。
共有32个优先级[0-31],最高优先级为0,最低优先级为31。
任务相关概念
任务状态
任务有多种运行状态。系统初始化完成后,创建的任务就可以在系统中竞争一定的资源,由内核进行调度。
任务状态通常分为以下四种:
就绪(Ready):该任务在就绪队列中,只等待CPU。
运行(Running):该任务正在执行。
阻塞(Blocked):该任务不在就绪队列中。包含任务被挂起(suspend状态)、任务被延时(delay状态)、任务正在等待信号量、读写队列或者等待事件等。
退出态(Dead):该任务运行结束,等待系统回收资源。
任务状态迁移
图1 任务状态示意图
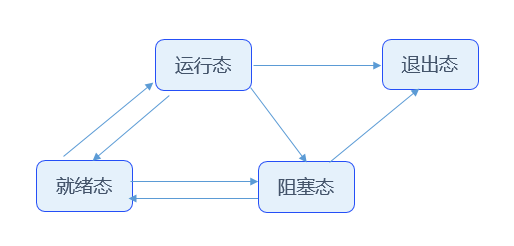
系统会同时存在多个任务,因此就绪态和阻塞态的任务分别会加入就绪队列和阻塞队列。队列只是相同状态任务的合集,加入队列的先后与任务状态迁移的顺序无关。运行态任务仅存在一个,不存在运行态队列。
任务状态迁移说明
就绪态→运行态 任务创建后进入就绪态,发生任务切换时,就绪队列中最高优先级的任务被执行,从而进入运行态,同时该任务从就绪队列中移出。
运行态→阻塞态 正在运行的任务发生阻塞(挂起、延时、读信号量等)时,将该任务插入到对应的阻塞队列中,任务状态由运行态变成阻塞态,然后发生任务切换,运行就绪队列中最高优先级任务。
阻塞态→就绪态(阻塞态→运行态的前置条件) 阻塞的任务被恢复后(任务恢复、延时时间超时、读信号量超时或读到信号量等),此时被恢复的任务会被加入就绪队列,从而由阻塞态变成就绪态;此时如果被恢复任务的优先级高于正在运行任务的优先级,则会发生任务切换,该任务由就绪态变成运行态。
就绪态→阻塞态 任务也有可能在就绪态时被阻塞(挂起),此时任务状态由就绪态变为阻塞态,该任务从就绪队列中移出,不会参与任务调度,直到该任务被恢复。
运行态→就绪态 有更高优先级任务创建或者恢复后,会发生任务调度,此刻就绪队列中最高优先级任务变为运行态,那么原先运行的任务由运行态变为就绪态,依然在就绪队列中。
运行态→退出态 运行中的任务运行结束,任务状态由运行态变为退出态。退出态包含任务运行结束的正常退出状态以及Invalid状态。例如,任务运行结束但是没有自删除,对外呈现的就是Invalid状态,即退出态。
阻塞态→退出态 阻塞的任务调用删除接口,任务状态由阻塞态变为退出态。
任务ID
在任务创建时通过参数返回给用户。系统中任务ID号是唯一的,是任务的重要标识。用户可以通过任务ID对指定任务进行任务挂起、任务恢复、查询任务名等操作。
任务优先级
优先级表示任务执行的优先顺序。任务的优先级决定了在发生任务切换时即将要执行的任务,就绪队列中最高优先级的任务将得到执行。
任务入口函数
新任务得到调度后将执行的函数。该函数由用户实现,在任务创建时,通过任务创建结构体设置。
任务栈
每个任务都拥有一个独立的栈空间,我们称为任务栈。栈空间里保存的信息包含局部变量、寄存器、函数参数、函数返回地址等。
任务上下文
任务在运行过程中使用的一些资源,如寄存器等,称为任务上下文。当这个任务挂起时,其他任务继续执行,可能会修改寄存器等资源中的值。如果任务切换时没有保存任务上下文,可能会导致任务恢复后出现未知错误。因此在任务切换时会将切出任务的任务上下文信息,保存在自身的任务栈中,以便任务恢复后,从栈空间中恢复挂起时的上下文信息,从而继续执行挂起时被打断的代码。
任务控制块(TCB)
每个任务都含有一个任务控制块(TCB)。TCB包含了任务上下文栈指针(stack pointer)、任务状态、任务优先级、任务ID、任务名、任务栈大小等信息。TCB可以反映出每个任务运行情况。
任务切换
任务切换包含获取就绪队列中最高优先级任务、切出任务上下文保存、切入任务上下文恢复等动作。
任务运行机制
用户创建任务时,系统会初始化任务栈,预置上下文。此外,系统还会将“任务入口函数”地址放在相应位置。这样在任务第一次启动进入运行态时,将会执行“任务入口函数”。
接口说明
OpenHarmony LiteOS-M内核的任务管理模块提供下面几种功能,接口详细信息可以查看API参考。
表1 任务管理模块接口
| 功能分类 | 接口描述 |
|---|---|
| 创建和删除任务 | LOS_TaskCreateOnly:创建任务,并使该任务进入suspend状态。 LOS_TaskCreate:创建任务,并使该任务进入ready状态,如果就绪队列中没有更高优先级的任务,则运行该任务。 LOS_TaskDelete:删除指定的任务。 |
| 控制任务状态 | LOS_TaskResume:恢复挂起的任务,使该任务进入ready状态。 LOS_TaskSuspend:挂起指定的任务,然后切换任务。 LOS_TaskJoin:挂起当前任务,等待指定任务运行结束并回收其任务控制块资源 LOS_TaskDelay:任务延时等待,释放CPU,等待时间到期后该任务会重新进入ready状态。传入参数为Tick数目。 LOS_Msleep:任务延时等待,释放CPU,等待时间到期后该任务会重新进入ready状态。传入参数为毫秒数。 LOS_TaskYield:当前任务时间片设置为0,释放CPU,触发调度运行就绪任务队列中优先级最高的任务。 |
| 控制任务调度 | LOS_TaskLock:锁任务调度,但任务仍可被中断打断。 LOS_TaskUnlock:解锁任务调度。 LOS_Schedule:触发任务调度。 |
| 控制任务优先级 | LOS_CurTaskPriSet:设置当前任务的优先级。 LOS_TaskPriSet:设置指定任务的优先级。 LOS_TaskPriGet:获取指定任务的优先级。 |
| 获取任务信息 | LOS_CurTaskIDGet:获取当前任务的ID。 LOS_NextTaskIDGet:获取任务就绪队列中优先级最高的任务的ID。 LOS_NewTaskIDGet:等同LOS_NextTaskIDGet。 LOS_CurTaskNameGet:获取当前任务的名称。 LOS_TaskNameGet:获取指定任务的名称。 LOS_TaskStatusGet:获取指定任务的状态。 LOS_TaskInfoGet:获取指定任务的信息,包括任务状态、优先级、任务栈大小、栈顶指针SP、任务入口函数、已使用的任务栈大小等。 LOS_TaskIsRunning:获取任务模块是否已经开始调度运行。 |
| 任务信息维测 | LOS_TaskSwitchInfoGet:获取任务切换信息,需要开启编译控制宏:LOSCFG_BASE_CORE_EXC_TSK_SWITCH。 |
开发流程
本节介绍任务模块的典型场景开发流程:
锁任务调度LOS_TaskLock,防止高优先级任务调度。
创建任务LOS_TaskCreate。
解锁任务LOS_TaskUnlock,让任务按照优先级进行调度。
延时任务LOS_TaskDelay,任务延时等待。
挂起指定的任务LOS_TaskSuspend,任务挂起等待恢复操作。
恢复挂起的任务LOS_TaskResume。
说明: - 执行Idle任务时,会对待回收链表中的任务控制块和任务栈进行回收。
任务名是指针,并没有分配空间,在设置任务名时,禁止将局部变量的地址赋值给任务名指针。
任务栈的大小按8字节大小对齐。确定任务栈大小的原则是,够用就行,多了浪费,少了任务栈溢出。
挂起当前任务时,如果已经锁任务调度,则无法挂起。
Idle任务及软件定时器任务不能被挂起或者删除。
在中断处理函数中或者在锁任务的情况下,执行LOS_TaskDelay会失败。
锁任务调度,并不关中断,因此任务仍可被中断打断。
锁任务调度必须和解锁任务调度配合使用。
设置任务优先级时可能会发生任务调度。
可配置的系统最大任务数是指:整个系统的任务总个数,而非用户能使用的任务个数。例如:系统软件定时器多占用一个任务资源,那么用户能使用的任务资源就会减少一个。
LOS_CurTaskPriSet和LOS_TaskPriSet接口不能在中断中使用,也不能用于修改软件定时器任务的优先级。
LOS_TaskPriGet接口传入的task ID对应的任务未创建或者超过最大任务数,统一返回-1。
在删除任务时要保证任务申请的资源(如互斥锁、信号量等)已被释放。
编程实例
本实例介绍基本的任务操作方法,包含2个不同优先级任务的创建、任务延时、任务锁与解锁调度、挂起和恢复等操作,阐述任务优先级调度的机制以及各接口的应用。示例代码如下:
本演示代码在 ./kernel/liteos_m/testsuites/src/osTest.c 中编译验证,在TestTaskEntry中调用验证入口函数ExampleTask。
#include "los_task.h"
UINT32 g_taskHiId;
UINT32 g_taskLoId;
#define TSK_PRIOR_HI 3 /* 高优先级任务的优先级 */
#define TSK_PRIOR_LO 4 /* 低优先级任务的优先级 */
UINT32 ExampleTaskHi(VOID)
{
UINT32 ret;
printf("Enter TaskHi Handler.\n");
/* 延时100个Ticks,延时后该任务会挂起,执行剩余任务中最高优先级的任务(即TaskLo任务) */
ret = LOS_TaskDelay(100);
if (ret != LOS_OK) {
printf("Delay TaskHi Failed.\n");
return LOS_NOK;
}
/* 100个Ticks时间到了后,该任务恢复,继续执行 */
printf("TaskHi LOS_TaskDelay Done.\n");
/* 挂起自身任务 */
ret = LOS_TaskSuspend(g_taskHiId);
if (ret != LOS_OK) {
printf("Suspend TaskHi Failed.\n");
return LOS_NOK;
}
printf("TaskHi LOS_TaskResume Success.\n");
return ret;
}
/* 低优先级任务入口函数 */
UINT32 ExampleTaskLo(VOID)
{
UINT32 ret;
printf("Enter TaskLo Handler.\n");
/* 延时100个Ticks,延时后该任务会挂起,执行剩余任务中最高优先级的任务 */
ret = LOS_TaskDelay(100);
if (ret != LOS_OK) {
printf("Delay TaskLo Failed.\n");
return LOS_NOK;
}
printf("TaskHi LOS_TaskSuspend Success.\n");
/* 恢复被挂起的任务g_taskHiId */
ret = LOS_TaskResume(g_taskHiId);
if (ret != LOS_OK) {
printf("Resume TaskHi Failed.\n");
return LOS_NOK;
}
return ret;
}
/* 任务测试入口函数,创建两个不同优先级的任务 */
UINT32 ExampleTask(VOID)
{
UINT32 ret;
TSK_INIT_PARAM_S taskParam1 = { 0 };
TSK_INIT_PARAM_S taskParam2 = { 0 };
/* 锁任务调度,防止新创建的任务比本任务高而发生调度 */
LOS_TaskLock();
printf("LOS_TaskLock() Success!\n");
taskParam1.pfnTaskEntry = (TSK_ENTRY_FUNC)ExampleTaskHi;
taskParam1.usTaskPrio = TSK_PRIOR_HI;
taskParam1.pcName = "TaskHi";
taskParam1.uwStackSize = LOSCFG_BASE_CORE_TSK_DEFAULT_STACK_SIZE;
taskParam1.uwResved = LOS_TASK_ATTR_JOINABLE; /* detach 属性 */
/* 创建高优先级任务,由于锁任务调度,任务创建成功后不会马上执行 */
ret = LOS_TaskCreate(&g_taskHiId, &taskParam1);
if (ret != LOS_OK) {
LOS_TaskUnlock();
printf("Example_TaskHi create Failed!\n");
return LOS_NOK;
}
printf("Example_TaskHi create Success!\n");
taskParam2.pfnTaskEntry = (TSK_ENTRY_FUNC)ExampleTaskLo;
taskParam2.usTaskPrio = TSK_PRIOR_LO;
taskParam2.pcName = "TaskLo";
taskParam2.uwStackSize = LOSCFG_BASE_CORE_TSK_DEFAULT_STACK_SIZE;
/* 创建低优先级任务,由于锁任务调度,任务创建成功后不会马上执行 */
ret = LOS_TaskCreate(&g_taskLoId, &taskParam2);
if (ret != LOS_OK) {
LOS_TaskUnlock();
printf("Example_TaskLo create Failed!\n");
return LOS_NOK;
}
printf("Example_TaskLo create Success!\n");
/* 解锁任务调度,此时会发生任务调度,执行就绪队列中最高优先级任务 */
LOS_TaskUnlock();
ret = LOS_TaskJoin(g_taskHiId, NULL);
if (ret != LOS_OK) {
printf("Join Example_TaskHi Failed!, 0x%x\n", ret);
} else {
printf("Join Example_TaskHi Success!\n");
}
return LOS_OK;
}
结果验证
编译运行得到的结果为:
LOS_TaskLock() Success!
Example_TaskHi create Success!
Example_TaskLo create Success!
Enter TaskHi Handler.
Enter TaskLo Handler.
TaskHi LOS_TaskDelay Done.
TaskHi LOS_TaskSuspend Success.
TaskHi LOS_TaskResume Success.
Join Example_TaskHi Success!
你可能感兴趣的鸿蒙文章
热门推荐
-
2、 - 优质文章
-
3、 gate.io
-
8、 golang
-
9、 openharmony
-
10、 Vue中input框自动聚焦