Java8新特性
Java8新特性
主要特性
- Lambda表达式
- 函数式接口
- 方法引用与构造器引用
- Stream API
- 接口中默认方法与静态方法
- 新时间日期API
- 最大化减少空指针异常(Optional)
- 。。。。
HashMap1.7
在JDK1.7 到 JDK1.8的时候,对HashMap做了优化
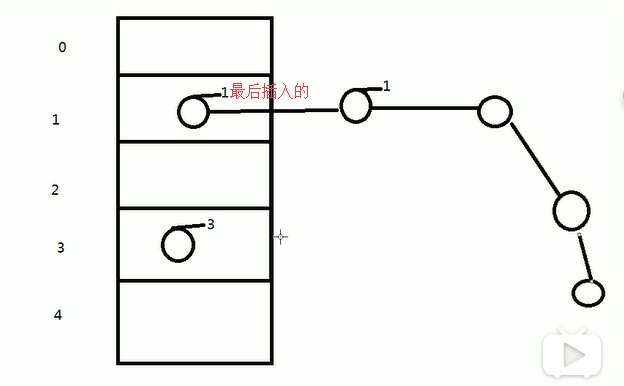
首先JDK1.7的HashMap当出现Hash碰撞的时候,最后插入的元素会放在前面,这个称为 “头插法”
JDK7用头插是考虑到了一个所谓的热点数据的点(新插入的数据可能会更早用到),但这其实是个伪命题,因为JDK7中rehash的时候,旧链表迁移新链表的时候,如果在新表的数组索引位置相同,则链表元素会倒置(就是因为头插) 所以最后的结果 还是打乱了插入的顺序 所以总的来看支撑JDK7使用头插的这点原因也不足以支撑下去了 所以就干脆换成尾插 一举多得
HashMap1.7存在死链问题
在JDK1.8以后,由头插法改成了尾插法,因为头插法还存在一个死链的问题
在说死链问题时,我们先从Hashmap存储数据说起,下面这个是HashMap的put方法
public V put(K key, V value)
{
......
//计算Hash值
int hash = hash(key.hashCode());
int i = indexFor(hash, table.length);
//各种校验吧
for (Entry<K,V> e = table[i]; e != null; e = e.next) {
Object k;
if (e.hash == hash && ((k = e.key) == key || key.equals(k))) {
V oldValue = e.value;
e.value = value;
e.recordAccess(this);
return oldValue;
}
}
modCount++;
//该key不存在,需要增加一个结点
addEntry(hash, key, value, i);
return null;
}
这里添加一个节点需要检查是否超出容量,出现一个负载因子
void addEntry(int hash, K key, V value, int bucketIndex)
{
Entry<K,V> e = table[bucketIndex];
table[bucketIndex] = new Entry<K,V>(hash, key, value, e);
//查看当前的size是否超过了我们设定的阈值threshold,如果超过,需要resize
if (size++ >= threshold)
resize(2 * table.length);//扩容都是2倍2倍的来的,
}
HashMap有 负载因子:0.75,以及 初始容量:16,扩容阈值:16*0.75 = 12,当HashMap达到扩容的条件时候,会把HashMap中的每个元素,重新进行运算Hash值,打入到扩容后的数组中。
既然新建了一个更大尺寸的hash表,然后把数据从老的Hash表中迁移到新的Hash表中。
void resize(int newCapacity)
{
Entry[] oldTable = table;
int oldCapacity = oldTable.length;
......
//创建一个新的Hash Table
Entry[] newTable = new Entry[newCapacity];
//将Old Hash Table上的数据迁移到New Hash Table上
transfer(newTable);
table = newTable;
threshold = (int)(newCapacity * loadFactor);
}
重点在这个transfer()方法
void transfer(Entry[] newTable)
{
Entry[] src = table;
int newCapacity = newTable.length;
//下面这段代码的意思是:
// 从OldTable里摘一个元素出来,然后放到NewTable中
for (int j = 0; j < src.length; j++) {
Entry<K,V> e = src[j];
if (e != null) {
src[j] = null;
do {
Entry<K,V> next = e.next;
int i = indexFor(e.hash, newCapacity);
e.next = newTable[i];
newTable[i] = e;
e = next;
} while (e != null);
}
}
}
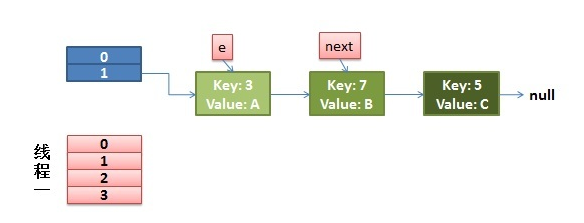
do循环里面的是最能说明问题的,当只有一个线程的时候:

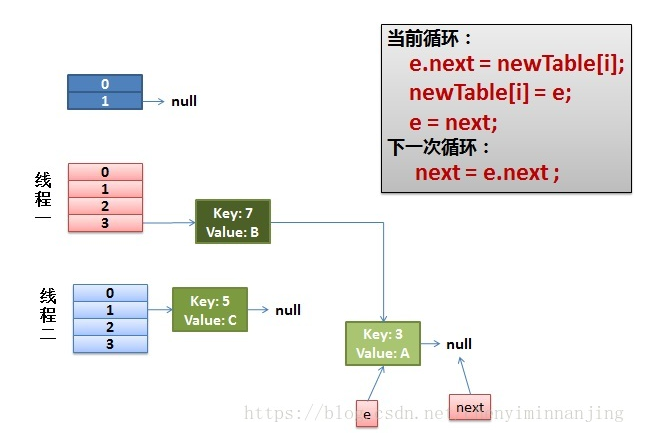
最上面的是old hash 表,其中的Hash表的size=2, 所以key = 3, 7, 5,在mod 2以后都冲突在table[1]这里了。接下来的三个步骤是Hash表 扩容变成4,然后在把所有的元素放入新表
do {
Entry<K,V> next = e.next; // <--假设线程一执行到这里就被调度挂起了
int i = indexFor(e.hash, newCapacity);
e.next = newTable[i];
newTable[i] = e;
e = next;
} while (e != null);
而我们的线程二执行完成了。于是我们有下面的这个样子
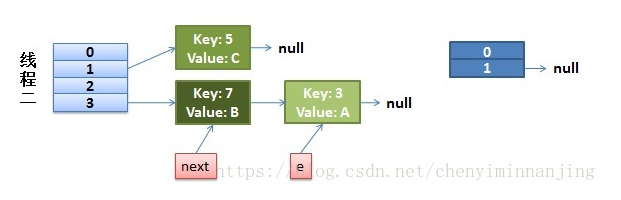
注意,因为Thread1的 e 指向了key(3),而next指向了key(7),其在线程二rehash后,指向了线程二重组后的链表。我们可以看到链表的顺序被反转后。 这里的意思是线程1这会还没有完全开始扩容,但e和next已经指向了,线程2是正常的扩容的,那这会在3这个位置上,就是7->3这个顺序。 然后线程一被调度回来执行:
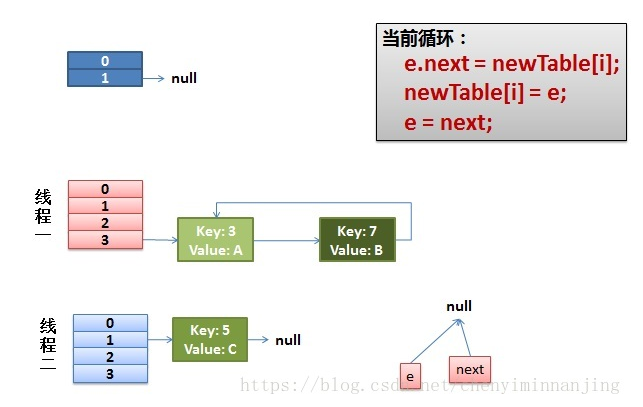
先是执行 newTalbe[i] = e; 然后是e = next,导致了e指向了key(7), 而下一次循环的next = e.next导致了next指向了key(3) 注意看图里面的线,线程1指向线程2里面的key3.
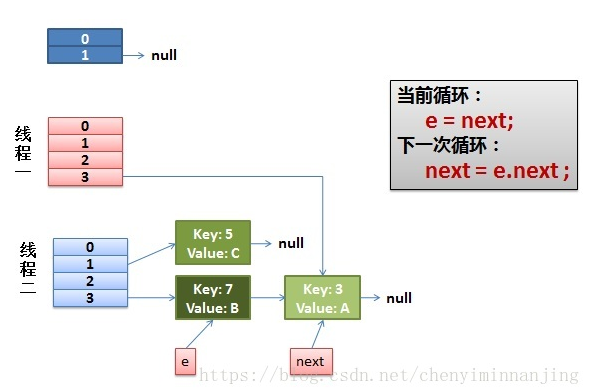
线程一接着工作。把key(7)摘下来,放到newTable[i]的第一个,然后把e和next往下移。
这时候,原来的线程2里面的key7的e和key3的next没了,e=key3,next=null。
当继续执行,需要将key3加回到key7的前面。 e.next = newTable[i] 导致 key(3).next 指向了 key(7)
注意:此时的key(7).next 已经指向了key(3), 环形链表就这样出现了。
线程2生成的e和next的关系影响到了线程1里面的情况。从而打乱了正常的e和next的链。于是,当我们的线程一调用到,HashTable.get(11)时,即又到了3这个位置,需要插入新的,那这会就e 和next就乱了
HashMap每次扩容为什么是2倍
首先看向HashMap中添加元素是怎么存放的
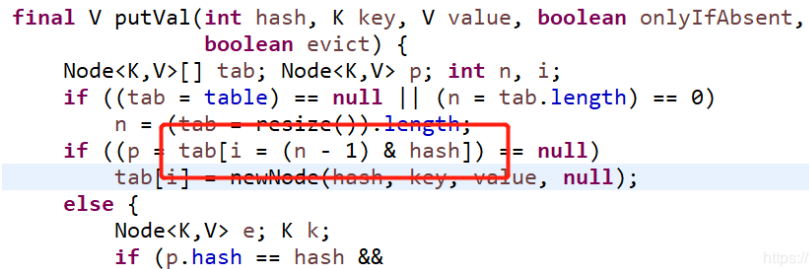
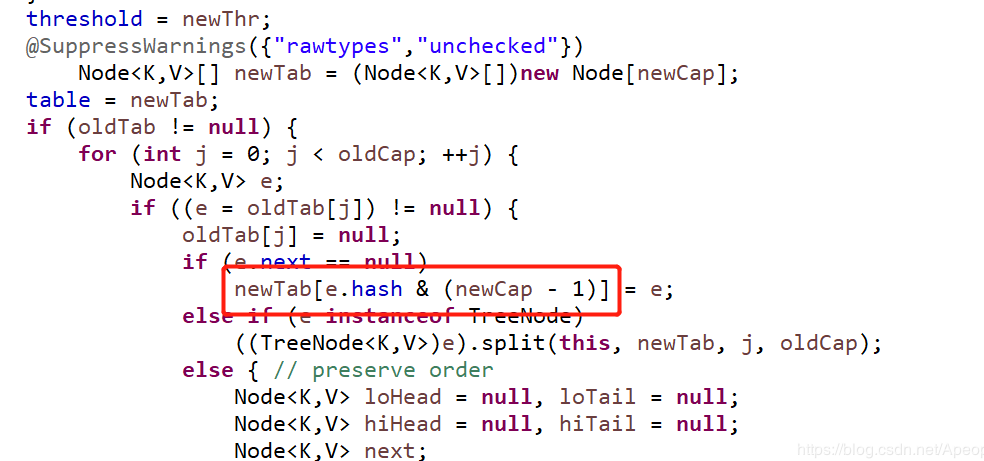
第一个截图是向HashMap中添加元素putVal()方法的部分源码,可以看出,向集合中添加元素时,会使用(n - 1) & hash的计算方法来得出该元素在集合中的位置;而第二个截图是HashMap扩容时调用resize()方法中的部分源码,可以看出会新建一个tab,然后遍历旧的tab,将旧的元素进过e.hash & (newCap - 1)的计算添加进新的tab中,也就是(n - 1) & hash的计算方法,其中n是集合的容量,hash是添加的元素进过hash函数计算出来的hash值
HashMap的容量为什么是2的n次幂,和这个(n - 1) & hash的计算方法有着千丝万缕的关系,符号&是按位与的计算,这是位运算,计算机能直接运算,特别高效,按位与&的计算方法是,只有当对应位置的数据都为1时,运算结果也为1,当HashMap的容量是2的n次幂时,(n-1)的2进制也就是1111111***111这样形式的,这样与添加元素的hash值进行位运算时,能够充分的散列,使得添加的元素均匀分布在HashMap的每个位置上,减少hash碰撞,下面举例进行说明。
当HashMap的容量是16时,它的二进制是10000,(n-1)的二进制是01111,与hash值得计算结果如下:
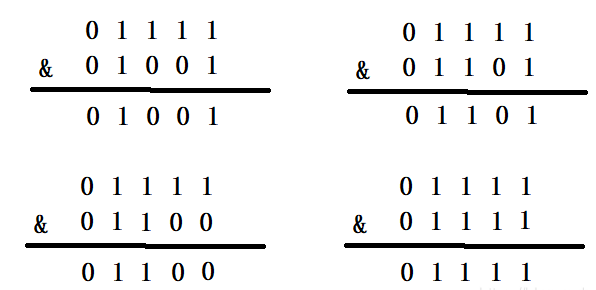
上面四种情况我们可以看出,不同的hash值,和(n-1)进行位运算后,能够得出不同的值,使得添加的元素能够均匀分布在集合中不同的位置上,避免hash碰撞,下面就来看一下HashMap的容量不是2的n次幂的情况,当容量为10时,二进制为01010,(n-1)的二进制是01001,向里面添加同样的元素,结果为:
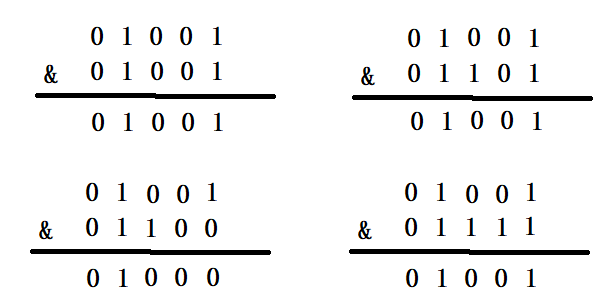
可以看出,有三个不同的元素进过&运算得出了同样的结果,严重的hash碰撞了。
终上所述,HashMap计算添加元素的位置时,使用的位运算,这是特别高效的运算;另外,HashMap的初始容量是2的n次幂,扩容也是2倍的形式进行扩容,是因为容量是2的n次幂,可以使得添加的元素均匀分布在HashMap中的数组上,减少hash碰撞,避免形成链表的结构,使得查询效率降低
JDK1.8结构变化
由JDK1.7的,数组 + 链表
JDK1.8变为:数组 + 链表 + 红黑树
具体触发条件为:某个链表连接的个数大于8,并且总的容量大于64的时候,那么会把原来的链表转换成红黑树
这么做的好处是什么:除了添加元素外,查询和删除效率比链表快
红黑树查询、增加和删除的时间复杂度:O(log2n)
链表的查询和删除的时间复杂度: O(n),插入为:O(1)
为什么HashMap使用红黑树而不是AVL树
在JDK1.8版本后,Java对HashMap做了改进,在链表长度大于8的时候,将后面的数据由链表改成了红黑树,以加快检索的速度
但是为什么使用的红黑树,而不是AVL树或者其它树呢?
最主要的原因:在CurrentHashMap中加锁了,实际上就是读写锁,如果写冲突就会等待,如果插入的时间过长,必然会导致等待的时间变长,而红黑树相比于AVL树,它的插入更快。
红黑树和AVL树都是常见的平衡二叉树,它们的查找,删除,修改的时间复杂度都是 O(log n)
AVL树和红黑树相比有以下的区别
- AVL树是更加严格的平衡,因此可以提供更快的查找速度,一般读取查找密集型任务,适用AVL树
- 红黑树更适合插入修改密集型任务
- 通常,AVL树的旋转比红黑树的旋转更加难以平衡和调试
总结
- AVL以及红黑树都是高度平衡的树形结构,它们非常的相似,真正的区别在于任何添加、删除操作时完成的旋转操作次数
- 两种时间复杂度都是O(logN),其中N是叶子的数量,但实际上AVL树在查找密集型任务上更快,利用更好的平衡,树遍历平均更短,另一方面,插入和删除上,AVL树较慢,因为需要更高的旋转次数才能在修改时正确地重新平衡数据结构
- 在AVL树中,从根到任何叶子节点的最短路径和最长路径之间的差异最多为1,在红黑树中,差异可以是2倍
- 两个都是O(logN)查找,但是平衡二叉树可能需要 O(logN)旋转,而红黑树需要最多两次旋转使其达到平衡(尽可能需要检查O(logN)节点以确定旋转的位置),旋转本身是O(1)操作,因为你只需要移动指针。
ConcurrentHashMap变化
为何JDK8要放弃分段锁?
由原来的分段锁,变成了CAS,也就是通过无锁化设计替代了阻塞同步的加锁操作,性能得到了提高。
- 通过使用Synchronized + CAS的方式实现并发访问
通过分段锁的方式提高了并发度。分段是一开始就确定的了,后期不能再进行扩容的,其中的段Segment继承了重入锁ReentrantLock,有了锁的功能,同时含有类似HashMap中的数组加链表结构(这里没有使用红黑树),虽然Segment的个数是不能扩容的,但是单个Segment里面的数组是可以扩容的。
JDK1.8的ConcurrentHashMap摒弃了1.7的segment设计,而是JDK1.8版本的HashMap的基础上实现了线程安全的版本,即也是采用数组+链表+红黑树的形式,虽然ConcurrentHashMap的读不需要锁,但是需要保证能读到最新数据,所以必须加volatile。即数组的引用需要加volatile,同时一个Node节点中的val和next属性也必须要加volatile。
至于为什么抛弃Segment的设计,是因为分段锁的这个段不太好评定,如果我们的Segment设置的过大,那么隔离级别也就过高,那么就有很多空间被浪费了,也就是会让某些段里面没有元素,如果太小容易造成冲突
弃用的原因
通过上述描述以及查看官方文档,弃用分段锁的原因主要有以下几点
- 加入多个分段锁 浪费了内存空间
- 生产环境中,map在放入时 竞争同一个锁的概率非常小,分段锁反而会造成更新等操作的长时间等待
- 为了提高GC的效率
新的同步方案
既然弃用了分段锁,那么一定有新的线程安全方案,我们来看看源码是怎么解决线程安全的呢?
源码保留segment代码,但是并没有使用
首先通过hash找到对应链表后,查看是否第一个object,如果是直接用CAS原则插入,无需加锁
Node<K,V> f; int n, i, fh; K fk; V fv;
if (tab == null || (n = tab.length) == 0)
// 这里在整个map第一次操作时,初始化hash桶, 也就是一个table
tab = initTable();
else if ((f = tabAt(tab, i = (n - 1) & hash)) == null) {
//如果是第一个object, 则直接cas放入, 不用锁
if (casTabAt(tab, i, null, new Node<K,V>(hash, key, value)))
break;
}
然后, 如果不是链表第一个object, 则直接用链表第一个object加锁,这里加的锁是Synchronized,虽然效率不如 ReentrantLock, 但节约了空间,这里会一直用第一个object为锁, 直到重新计算map大小, 比如扩容或者操作了第一个object为止。
// 这里的f即为第一个链表的object
synchronized (f) {
if (tabAt(tab, i) == f) {
if (fh >= 0) {
binCount = 1;
for (Node<K,V> e = f;; ++binCount) {
K ek;
if (e.hash == hash &&
((ek = e.key) == key ||
(ek != null && key.equals(ek)))) {
oldVal = e.val;
if (!onlyIfAbsent)
e.val = value;
break;
}
Node<K,V> pred = e;
if ((e = e.next) == null) {
pred.next = new Node<K,V>(hash, key, value);
break;
}
}
}
else if (f instanceof TreeBin) { // 太长会用红黑树
Node<K,V> p;
binCount = 2;
if ((p = ((TreeBin<K,V>)f).putTreeVal(hash, key,
value)) != null) {
oldVal = p.val;
if (!onlyIfAbsent)
p.val = value;
}
}
else if (f instanceof ReservationNode)
throw new IllegalStateException("Recursive update");
}
}
分段锁技术是在java8以前使用的,在java8已经弃用了,更新为synchronized+cas
ConcurrentHashMap为什么要使用synchronized而不是如ReentranLock这样的可重入锁?
这个问题我们将要从几个角度来讨论
- 锁的粒度
- 首先锁的粒度没有变粗,甚至变得更细了。每次扩容一次,ConcurrentHashMap的并发度就扩大
- Hash冲突
- 在JDK1.7中,ConcurrentHashMap从二次hash方式(Segment - > HashEntry)能够快速的找到查找的元素,在JDK1.8中,通过链表+红黑树的形式,弥补了put、get时的性能差距。
- 扩容
- JDK1.8中,在ConcurrentHashMap进行扩容时,其他线程可以通过检测数组中的节点决定是否对这条链表进行扩容,减少了扩容的粒度,提高了扩容的效率。
为什么是用Synchronized 而不是 ReentrantLock?
- 减少内存开销
- 假设使用可重入锁来获得同步支持,那么每个节点都需要通过继承AQS来获得同步支持。但并不是每个节点都需要同步支持,只有链表的头结点(红黑树的根节点)需要同步,这无疑带来了巨大的浪费
- 获得JVM支持
- 可重入锁毕竟是API这个级别的,后续的性能优化空间 很小
- Synchronized则是由JVM直接支持,JVM能够在运行时做出对应的优化措施:锁粗化,锁消除,锁自旋等。这就是使得Synchronized能够随着JDK版本的升级而无需改动代码的前提下获得性能上的提升。
内存结构优化
取消永久区,把方法区 放在 元空间中
方法区主要用于存储一些类模板

OOM错误发生概率降低
同时相关JVM调优命令变为:
MetaspaceSize
MaxMetaspaceSize
参考
- https://blog.csdn.net/zhangvalue/article/details/101483736
- https://blog.csdn.net/apeopl/article/details/88935422
- https://blog.csdn.net/chenyiminnanjing/article/details/82706942
你可能感兴趣的文章
热门推荐
-
2、 优质文章
-
3、 gt
-
7、 openharmony
-
9、 golang
-
10、 Vue中input框自动聚焦